

























Appendix 1 list of Parameters
State 16.11.15
Misprints and technical changes reserved
Page 2
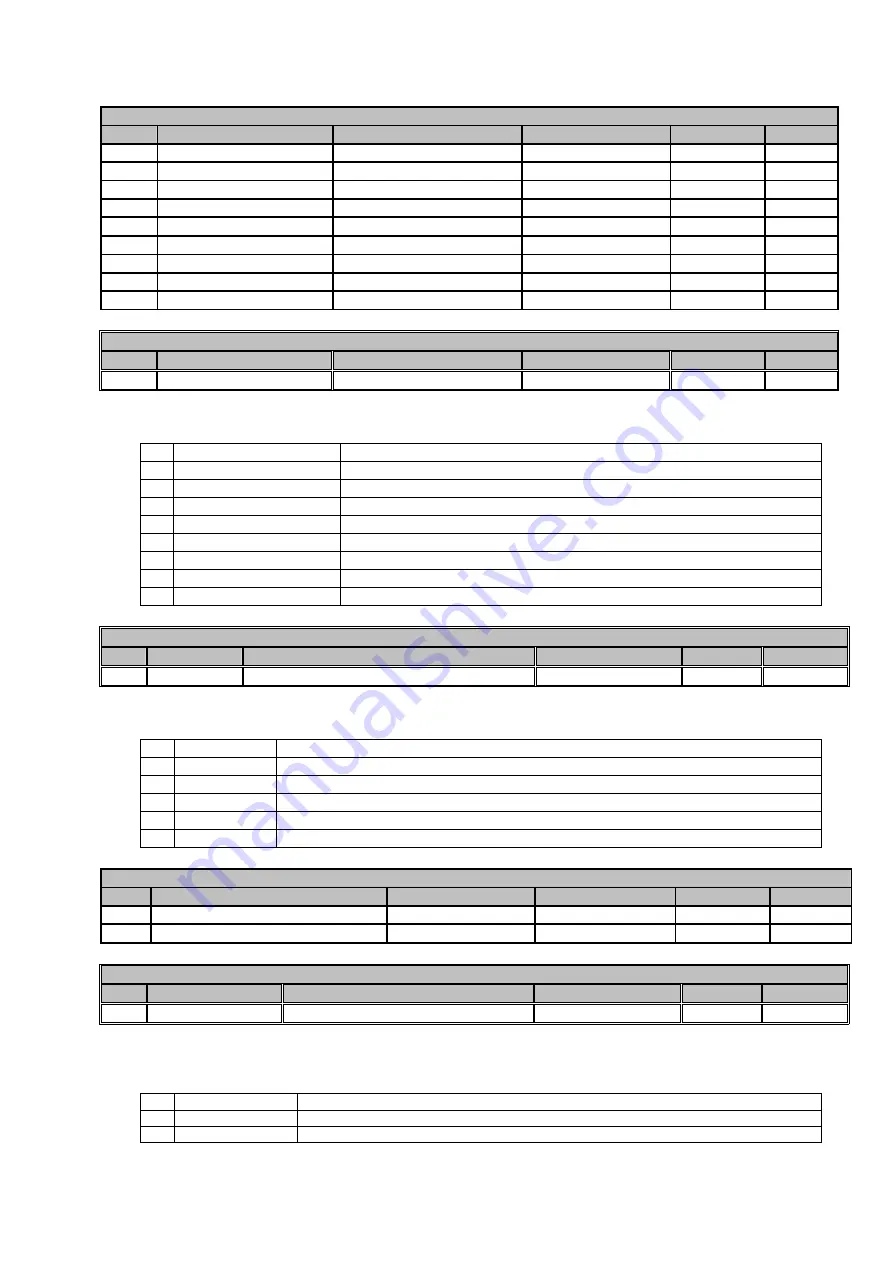
01: EEPROM, SMC and EZU
ID
Name
Value-Range
Default-Value
Unit
Access
7
RTC Day
1 ... 31
---
d
R
8
RTC Month
1 ... 12
---
mon
R
9
RTC Year
2007 ... 2099
---
y
R
11
N Read Errors
0 ... 65535
---
NONE
12
N Write Errors
0 ... 65535
---
NONE
14
main_state_dsp_check
0 ... 65535
---
NONE
15
init_counter_dsp_check
0 ... 1
---
NONE
16
test1_counter_dsp_check
0 ... 65535
---
NONE
17
test2_counter_dsp_check
0 ... 65535
---
NONE
01: EEPROM, SMC and EZU
ID
Name
Value-Range
Default-Value
Unit
Access
19
Peripherals
0000h ... 00FEh
---
[bits]
R
Display of existing circuit board options
Bit Name
Notes
0
1 CanOpenPCBoard
2 ProfibusPCBoard
3 EthernetPCBoard
4 ADIOPCBoard
5 TaeEncoderPCBoard
6 422EncoderPCBoard
7 ResolverPCBoard
02: Motor Data
ID
Name
Value-Range
Default-Value
Unit
Access
20 Motor Type
[00] ASM_UF ... [04] SM_SL
---
RW
Selecting the motor type:
No. Name
Notes
0 ASM U/F
Asynchronous motor operated with voltage/frequency characteristics
1 ASM Sensor
Vector controlled asynchronous motor with rotation speed sensor
2 ASM Sensorless Vector controlled asynchronous motor without rotation speed sensor
3 Syn Sensor
Synchronous motor with rotor position and rotation speed sensor
4 Syn Sensorless Synchronous motor without “sensorless”rotation speed sensor
02: Motor Data
ID
Name
Value-Range
Default-Value
Unit
Access
21
Article Number (TAE)
0 ... 65535
---
RW
22
Motor Size
0 ... 65535
---
RW
02: Motor Data
ID
Name
Value-Range
Default-Value
Unit
Access
23 Kind of Winding
[00] Star ... [01] Delta
[00] Stern
RW
Choosing the method of connection:
Not in use, always choose the star connection
Nr. Name
0 Star
1 Delta







































































