

























Center of Gravity optimization
●
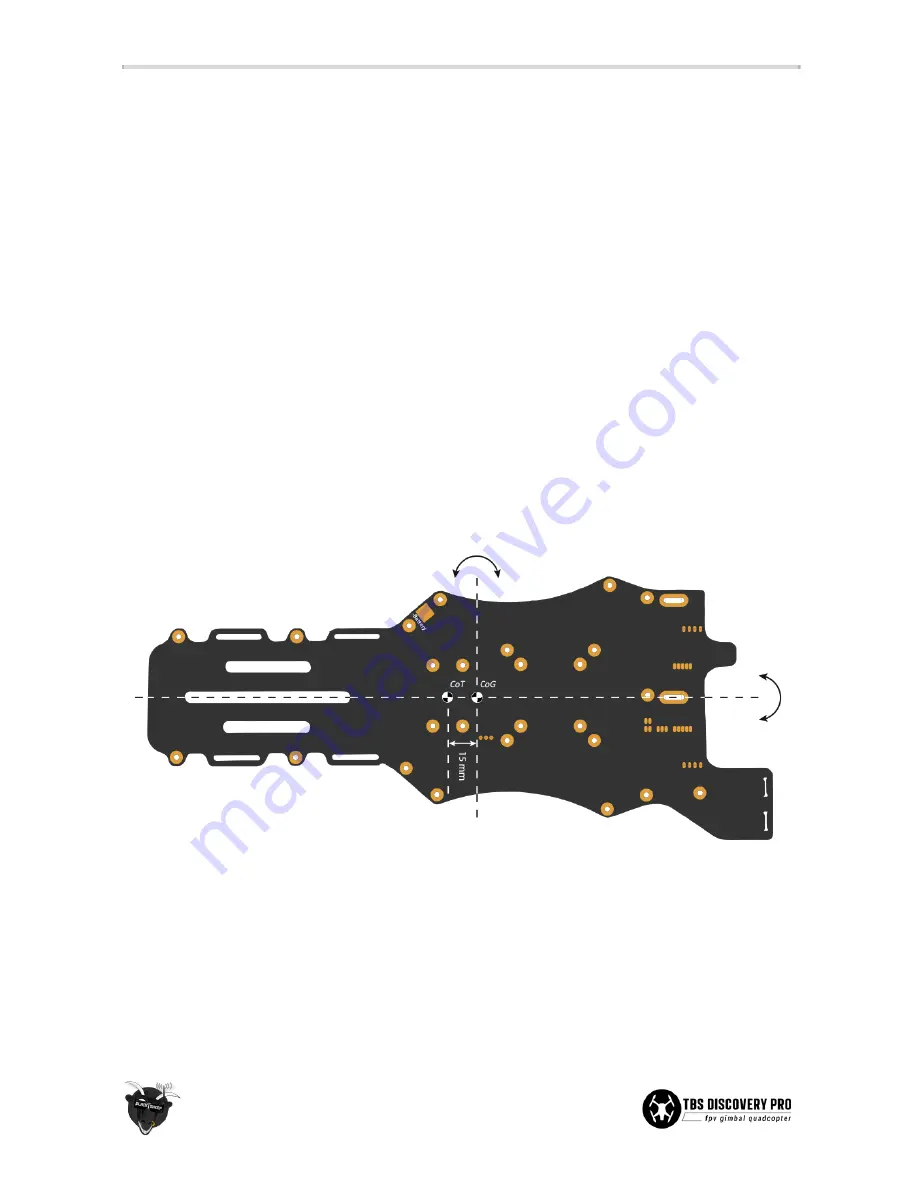
A properly balanced multirotor will distributing the weight (mass) equally over the four motors. The
mark on the bottom plate is the Center of Thrust (CT, CoT) mark and the Center of Gravity (CG, CoG)
spot is 15mm forward of this mark. When holding the frame in the air at the CG spot it should ideally be
level and not dip to either side.
●
After completing the build and loading up the frame, adjust the CG over the lateral (pitch) axis by
primarily moving the battery pack forward or backward. You might need to move the middle two frame
spacers to accommodate the battery. The CG over the longitudinal (roll) axis should be in the center of
the frame front-to-back and should only need slight adjustments.
●
When the frame is out of balance some motors are going to have to work harder than others and you
will have less authority in a given axis due to the fact that one or more motors are already working
more than normally required. Small balance variations are countered very well by the flight controller
and should not cause any problems.
●
If the quadcopter is too nose heavy it will bob up and down in forward flight and if it is too tail heavy it
will get very twitchy and hard to fly.
●
As a side note, the flight controller does not need to be over the CG spot. It should be mounted in the
center of the white rectangular lines on bottom plate.
42






































































