












AN-000350
Document Number: AN-000350
Page 5 of 13
Revision: 1.0
After loading the image if USB 3 EDBG port connection needs to be removed turn OFF all the four switches of
“SW5” (move them away from the blue push button).
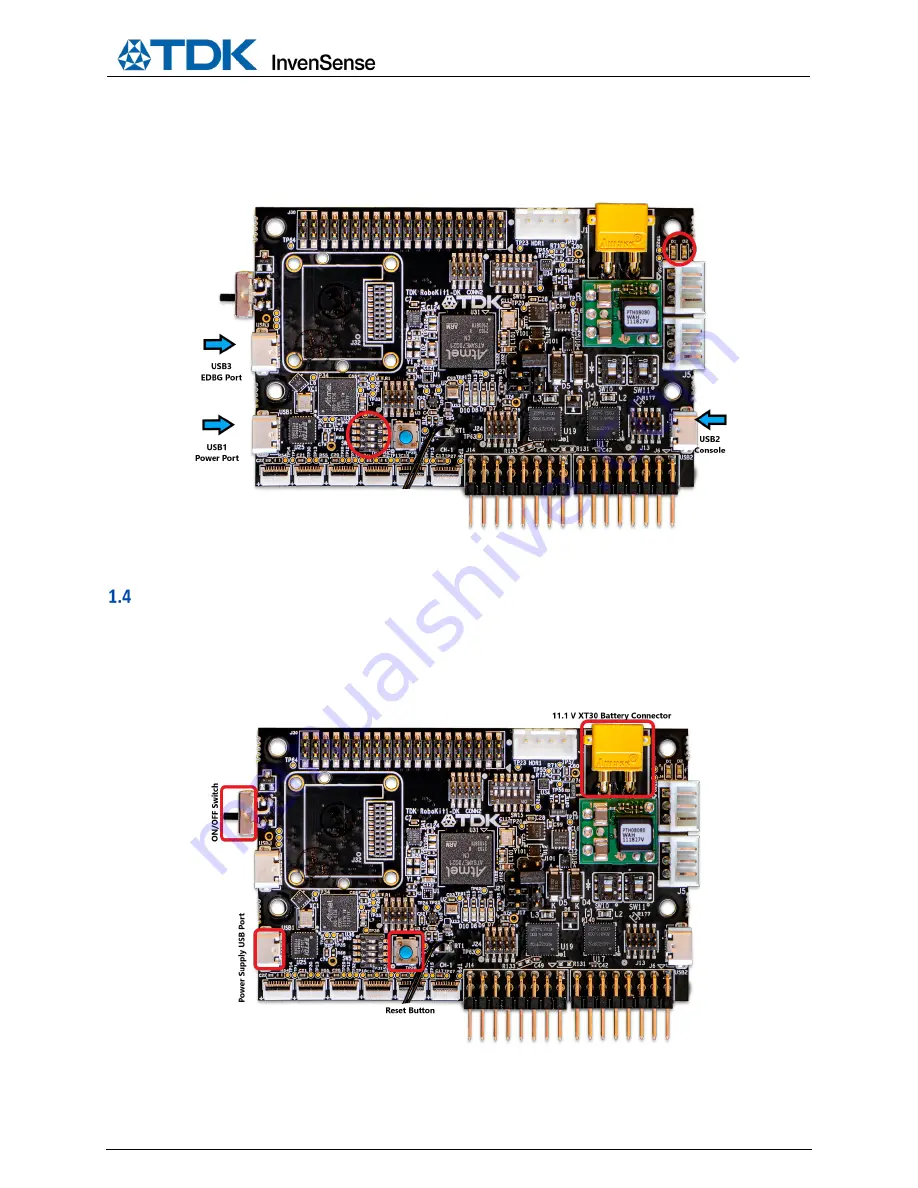
POWERING ON
As described in the Figure 5 below, power to the board can be supplied either through USB1 or by connecting a
11.1 Volt battery with XT30 connector. When the power is supplied through USB1 the board will not be able to
drive the motors. However, when the power is supplied through the battery connector it will be able to drive the
motors. The RoboKit1 has an on/off switch to turn the power on or off and a reset button to reset the board.







































































