
























11
3.1.4 Testing the Interface Connections
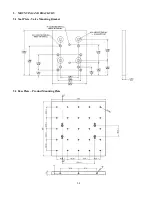
TS250, TS350, TS500R and TS920 with TSR-VCABLE and TSR-DJETCABLE – 1 Dispense Head in Use
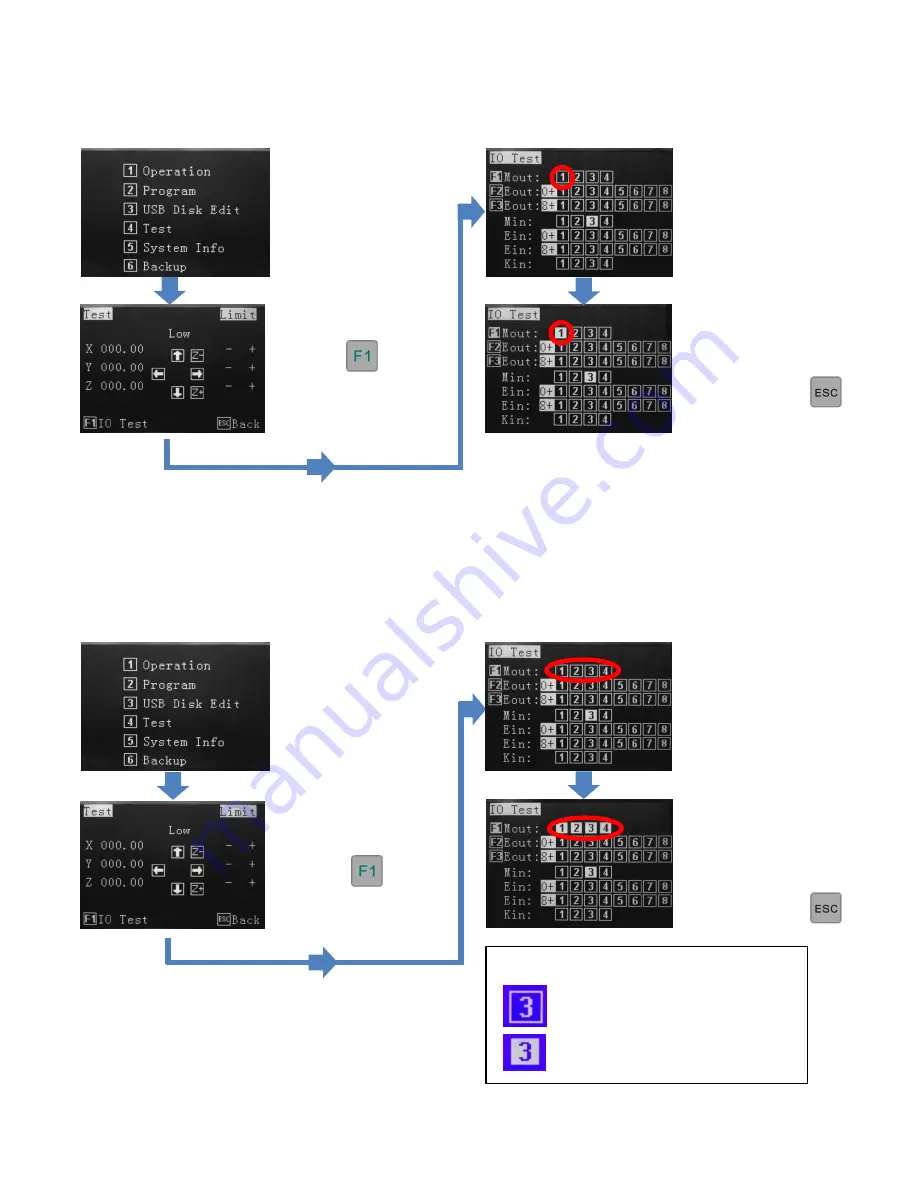
TS250, TS350 and TS500R with TSR-VCABLE – Multiple Dispense Heads in Use
The TSR2000 Series robot is capable of operating up to 4 dispensers/controllers during a program. An
optional
cable
is made available for this function. Please contact Techcon if this specialty cable is required. Follow the instructions,
below, to test the other available outputs.
Press 4
Press
Press 4
Press
By pressing button 1, the
controller will activate. If
the system is complete and
under pressure, fluid will
exit out of the dispense
outlet.
Press 1 to turn off output.
To go back to main screen,
press
multiple times.
Press 1 through 4 to turn
off outputs.
To go back to main
screen, press
multiple times
By pressing buttons 1
through 4, the dispensers/
controllers will activate. If
the systems are complete
and under pressure, fluid
will exit out of the
dispense outlets.
Legend:
Output
not
activated
Output activated





































































