





























©
Technosoft 2007
14
IBL2403 Technical Reference
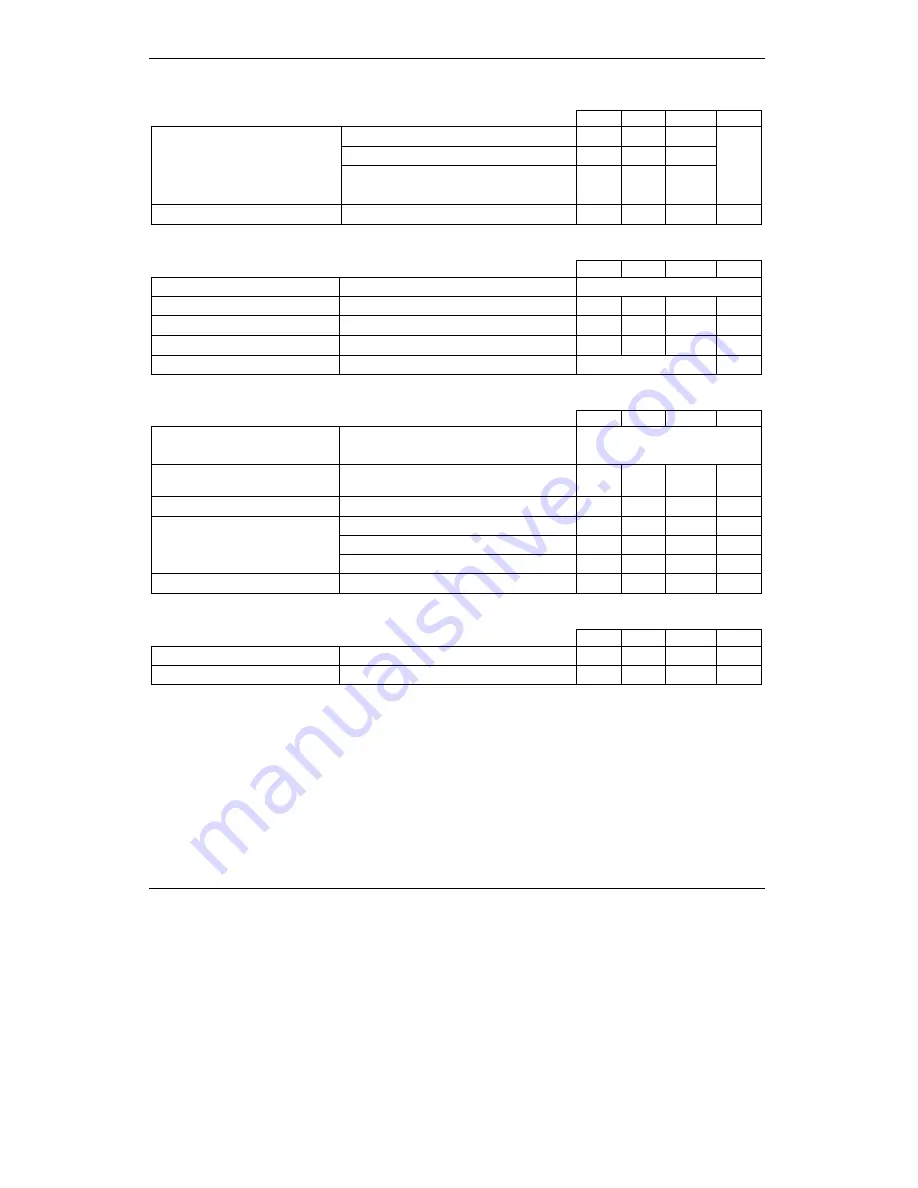
Hall Inputs (digital)
All voltages referenced to GND.
Min.
Typ. Max.
Units
Logic “LOW”
-0.5
0
0.8
Logic “HIGH”
2
5
5.5
Input voltage
Absolute maximum, surge
(duration
≤
1ms)
†
-8 +8
V
Low level input current
Internal 1 k
Ω
pull-ups to +5 V
DC
5 6 mA
RS-232
Min.
Typ. Max.
Units
Standards compliance
TIA/EIA-232-C
Bit rate
Depending on software settings
9600
115200 Baud
ESD Protection
Human Body Model (100 pF, 1.5 k
Ω
)
±
15
KV
Input voltage
RX232 input
-25
-
+25
V
Output short-circuit withstand
TX232 output to GND
Guaranteed
CAN-Bus
All voltages referenced to GND
Min.
Typ. Max.
Units
Standards compliance
CAN-Bus 2.0B error active;
ISO 11898-2
Recommended transmission line
impedance
Measured at 1MHz
90
120
150
Ω
Bit rate
Depending on software settings
125K
1M
Baud
Bit rate = 125kbps …250kbps
64
-
Bit rate = 500kbps
50
-
Number of network nodes
Bit rate = 1Mbps
32
-
ESD Protection
Human Body Model
±
15
KV
Supply Output
Min.
Typ. Max.
Units
+5V
OUT
Voltage
4.75
5
5.25
V
+5V
OUT
available current
220
mA
Summary of Contents for IBL2403 Series
Page 2: ......
Page 4: ......
Page 8: ... Technosoft 2007 VI IBL2403 Technical Reference ...
Page 89: ......
Page 90: ......







































































