



























Technosoft 2021
25
iPOS360x HX-CAN Technical Reference
3.5.8 Feedback connections
3.5.8.1
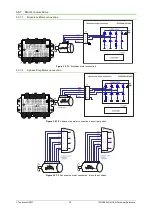
Single-ended Incremental Encoder Connection ( only with P028.00x.E561)
Figure 3.5.8.1
Single-ended incremental encoder connection
CAUTION!
DO NOT CONNECT UNTERMINATED WIRES. THEY MIGHT PICK UP
UNWANTED NOISE AND GIVE FALSE ENCODER READINGS.
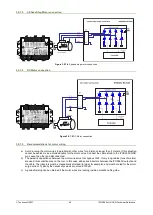
3.5.8.2
Differential Incremental Encoder Connection ( only with P028.00x.E501)
Figure 3.5.8.2.
Differential incremental encoder connection
Remarks:
1. For the encoder differential connection,
120Ω
(0.25W) terminators are included in the drive.
2. The length of the cables must be up to 30m, reducing the exposure to voltage surges in industrial environment.







































































