


















Per il termine INTEGRALE:
"Int"
- Tempo Integrale
Per il termine DERIVATIVO:
"dEr"
- Tempo derivativo
Oltre al parametro
"Prat"
(Power Ratio), nel quale è necessario impostare
il rapporto tra la potenza dell'elemento comandato dall'uscita C2 e potenza
dell'elemento comandato dall'uscita C1. Qualora il parametro "Prat" fosse
impostato = 0 , l'uscita C2 viene disabilitata e il regolatore si comporterà
esattamente come un regolatore PID a singola azione attraverso l'uscita C1.
4.7 - REGOLATORE PID PER AZIONAMENTI MOTORIZZATI A
POSIZIONAMENTO TEMPORALE (C1,C2)
Questo tipo di regolazione viene utilizzato per il controllo degli impianti
dotati di un azionamento motorizzato con controlli di apertura e chiusura
che in assenza di comandi rimane nel punto raggiunto. Questo tipo di
regolazione può avvenire solo quando lo strumento è dotato di entrambe le
uscite di regolazione (C1 e C2) a relè ed è stato definito il funzionamento
dell'uscita C2/A4 per l'utilizzo come C2 per azionamenti motorizzati (par.
"C2" = "3Pt"). In questo tipo di regolazione il parametro "Func" deve
essere impostato come "HEAt" in modo che l'uscita C1 stabilisca il
comando di apertura, mentre l'uscita C2 quello di chiusura
dell'azionamento. Il sistema di controllo utilizzato, non prevede una
retroazione per stabilire la posizione attuale dell'azionamento poichè questa
posizione è rappresentata dal valore assunto dal contributo integrale.
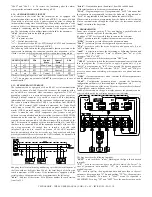
Qualora l'attuatore non fosse dotato di contatti di finecorsa di sicurezza che
interrompano l'azionamento a fine corsa è necessario dotare l'impianto di
questi fine corsa (SQo, SQc) come rappresentato in figura
Il modo di regolazione di tipo PID per azionamenti motorizzati agisce
quindi sulle uscite C1 e C2 in funzione del Set point impostato ("SEt1"), e
dell'algoritmo di controllo dello strumento che prevede l'impostazione dei
seguenti parametri:
Per il termine PROPORZIONALE:
"Pb"
- Banda Proporzionale
"rS"
- Reset manuale
Per il termine INTEGRALE:
"Int"
- Tempo Integrale
Per il termine DERIVATIVO:
"dEr"
- Tempo derivativo
Oltre ai parametri :
"tcor"
: Tempo di corsa. E' il tempo, espresso in secondi, che occorre
all'azionamento per passare dalla posizione "tutto aperto" alla posizione
"tutto chiuso".
"SHrI"
: Valore minimo di regolazione. E' il valore che deve aver
raggiunto la regolazione (in %) prima che abbia effetto sull'uscita. Serve
per evitare che il controllo intervenga troppo frequentemente.
"dbEr"
: Zona morta. E' la zona intorno al set point, entro la quale le uscite
di controllo non vengono attivate. L'azionamento non viene attivato quando
il valore di processo è entro il campo [SEt1-dbEr ... SEt1+dbEr].
"PoSi"
: Posizionamento all'accensione. E' la posizione in cui si deve
portare l'azionamento quando si accende lo strumento. Può assumere i
seguenti valori :
no = l'azionamento rimane dove si trova,
OPEn = l'azionamento si porta in posizione di "tutto aperto",
CloS = l'azionamento si porta in posizione di "tutto chiuso".
Se si programmano le opzioni "OPEn" o "CloS", all'accensione il display
mostrerà l'indicazione "SEt Flot" e l'apparecchio attiverà l' uscita C1 (se
"OPEn") o C2 (se "CloS") per il tempo impostato al par. "tcor" dopo di che
inizierà la regolazione.
4.8 - FUNZIONI DI AUTOTUNING
E SELFTUNING
Lo strumento è impostato in fabbrica con i parametri relativi alla
regolazione PID su valori generici. Qualora questi non dovessero risultare
ottimali per la regolazione si consiglia di attivare la funzione di
AUTOTUNING o la funzione di SELTUNING che permettono la
sintonizzazione automatica del regolatore PID.
La funzione di
AUTOTUNING
prevede il calcolo dei parametri PID
attraverso un ciclo di sintonizzazione, terminato il quale i parametri
vengono memorizzati dallo strumento e durante la regolazione rimangono
costanti.
La funzione di
SELFTUNING
(self tuning rule based "IN TUNE")
prevede invece il monitoraggio della regolazione e il continuo ricalcolo dei
parametri durante la regolazione.
Per attivare la funzione di AUTOTUNING procedere come segue:
1) Impostare ed attivare il Set point desiderato.
2) Impostare il parametro "Cont" come "Pid".
3) Impostare il parametro "Func" in funzione del processo da controllare
attraverso l'uscita C1. Se lo strumento comanda un azionamento
motorizzato impostare "HEAt".
4) Impostare, se presente, il parametro "C2" come "-Pid" se lo strumento
comanda un impianto con doppia azione oppure "3Pt" se lo strumento
comanda un azionamento motorizzato a 3 punti.
5) Se lo strumento comanda un azionamento motorizzato impostare al par.
"tcor" il tempo di corsa dell'azionamento, espresso in secondi.
6) Impostare il parametro "SELF" come "no"
7) Impostare il parametro "Auto" come:
- "FaSt" se si desidera effettuare una sintonizzazione rapida del processo
durante il raggiungimento del Set point. Va fatto notare che la
sintonizzazione "FAST" non si attiva se la PV è maggiore di [SetPoint / 2]
("Func"="HEAT") o se è minore di [Se SetPoint / 2]
("Func"="Cool").
- "SP" se si desidera effettuare l'autotuning oscillatorio sul valore di Set
Point programmato, oppure:
- "LoSP" se si desidera effettuare l'autotuning oscillatorio su un valore
inferiore (pari al 70 % del Set Point impostato).
8) Impostare il parametro "PidP" come:
- "SP" se si desidera effettuare l'autotuning in modo da ottimizzare il
calcolo dei parametri per eventuali variazioni di Set point, oppure:
- "Load" se si desidera effettuare l'autotuning in modo da ottimizzare il
calcolo dei parametri per eventuali variazioni del carico dell'impianto
controllato.
9) Uscire dalla programmazione parametri.
10) Collegare lo strumento all'impianto comandato.
11) Attivare l'autotuning selezionando "tunE" nel menù "SEL"
A questo punto la funzione di Autotuning è attivata e viene segnalata
attraverso il led "AT" lampeggiante. Il regolatore attua quindi una serie di
operazioni sull'impianto collegato al fine di calcolare i parametri della
regolazione PID più idonei. Attendere quindi il termine del processo di
Autotuning, segnalato dallo spegnimento del led "AT". Durante
l'esecuzione dell'autotuning di tipo oscillatorio, vengono fatti eseguire
alcuni cicli di regolazione ON-OFF, che portano il valore di processo ad
oscillare anche abbondantemente intorno al valore di Set point . Se il
processo non consente grosse variazioni di temperatura al di sopra del
valore di Set impostato, si consiglia di selezionare il ciclo di autotuning
come "LoSP". In questo caso il display SV, durante l'autotuning, mostrerà
un valore di Set Point pari al 70 % del Set impostato. La durata del
processo di Autotuning è limitata ad un massimo di 12 ore. Nel caso in cui
il processo non sia terminato nell'arco di 12 ore lo strumento visualizzerà
"toAt". Nel caso invece si dovesse verificare un errore della sonda lo
strumento viene messo automaticamente nello stato di "OFF" e al cessare
dell'errore lo strumento visualizzerà "noAt". In questo caso riavviare
l'autotuning. I valori calcolati saranno memorizzati automaticamente dallo
strumento al termine dell'esecuzione del ciclo di Autotuning nei parametri
relativi alla regolazione PID. Una volta terminato l'autotuning si ricorda di
impostare il parametro di configurazione "Auto" come "no" se si desidera
non far comparire l'opzione di attivazione dell'autotuning "tunE" nel menù
"SEL".
Per attivare la funzione di SELFTUNING procedere come segue:
1) Impostare ed attivare il Set point desiderato.
2) Impostare il parametro "Cont" come "Pid".
TECNOLOGIC - THP 94
USER MANUAL (I - GB) - Vr. 05 - ISTR 01195 - PAG. 5







































































