





























3-25
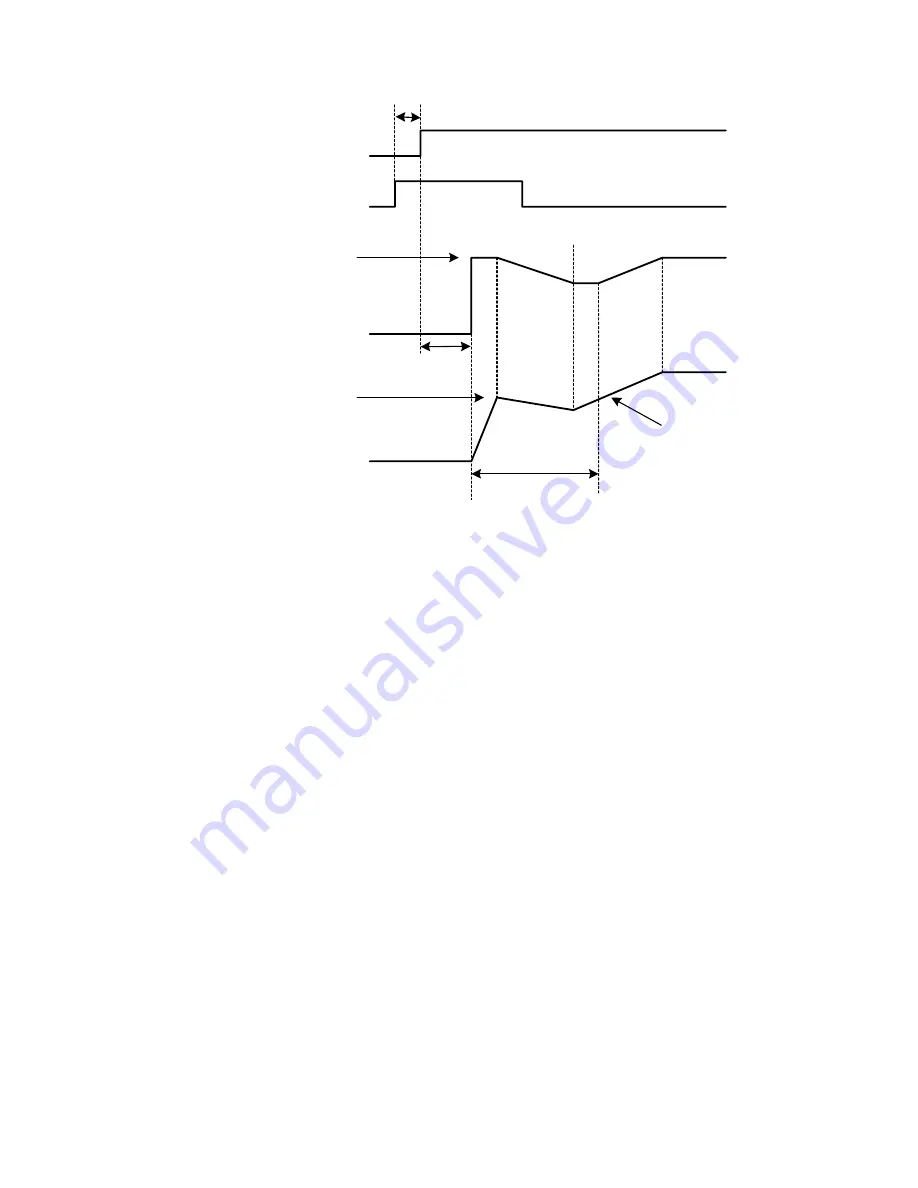
FWD(or REV) run command
Speed search command
Max output frequency
(or running frequency
while the speed search
is being performed)
Output frequency
Min baseblock time
voltage at speech search
ouput voltage
speed search operation
retuen to voltage at
normal operation
Synchronous speed dectection
<0.5 sec
Fig. 26.
Speed search timing chart
•
The speed search command can be set through the multi-function contact input
terminal
g
~
j
(By setting the parameters Sn-25 ~ Sn-28).
If Sn-25 ~ Sn-28= 21 : Speed search is performed from Max. output frequency
and motor is coasting freely.
If Sn-25 ~ Sn-28= 22 : Speed search starts from the frequency command when the
speed search command is enabled.
•
After the inverter output is blocked, the user should input speed search command
then enable run operation, the inverter will begin to search the motor speed after the
min. baseblock time Cn-37.
•
Speed search operation, if the inverter output current is less than Cn-35, the inverter
will take the output frequency as the real frequency at that time. From those values
of real frequency, the inverter will accelerate or decelerate to the set frequency
according to the acceleration or deceleration time.
•
While the speed search command is being performed, the user can slightly decrease
the setting of V/F curve (Cn-38) in order to prevent the OC protection function
enabled. Normally, the V/F curve need not be changed. (As below)
•
Speed search operating V/F curve = Cn-38 * (normal operating V/F curve )
Note : 1. The speed search operation will be disabled if the speed search command is
enacted from the Max. frequency and the setting frequency. (I.e., Sn-25=20, Sn-
26=21 and multi-function input terminals
g
,
h
is used at the same time).
2. Make sure that the FWD/REV command must be performed after or at the







































































