





























3-28
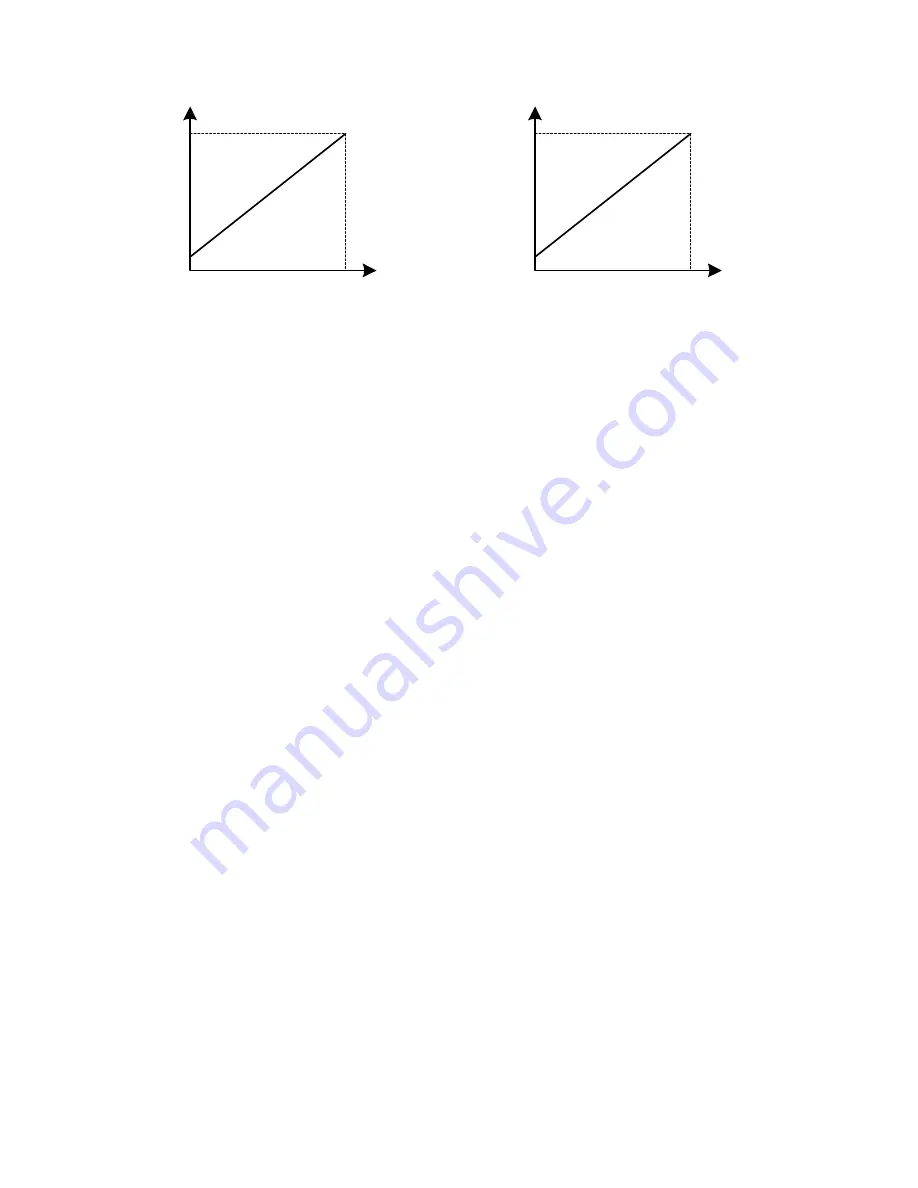
Output
frequency
Integral time
0 %
100 %
Cn-50
Cn-48
Proportional gain
Output
frequency
0 %
100 %
Cn-49
Cn-47
Fig. 28.
(47)
ASR Upper Bound
(Cn-51)
(48)
ASR Lower Bound
(Cn-52)
•
These settings of Cn-51 and Cn-52 will limit the ASR range.
(49)
Excessive Speed Deviation Detection Level (Cn-53)
•
This parameter set the level of detecting PG speed deviation. The value of Cn-02 is
referred as 100%, the default unit setting is 1%.
(50)
Overspeed Detection Level
(Cn-54)
•
Set this parameter for detecting overspeed. The value of Cn-02 is referred as 100%,
the default unit setting is 1%. Please refer to the setting of Sn-43.
(51)
PID Integral Upper Bound
(Cn-55)
(52)
PID Primary Delay Time Constant (Cn-56)
•
Please refer to Fig. 14 “Block diagram for PID control in inverter”
•
The parameter Cn-55 prevents the calculated value of the integral control of PID
from exceeding the fixed amount. The value is limited within 0-109% of Max.
output frequency (100%). Increase Cn-55 will improve the integral control. If
hunting cannot be reduced by decreasing the Bn-18 or increasing Cn-56, Cn-55 has
to decrease. If the setting of Cn-55 is too small, the output may not match the target
setting.
•
The parameter Cn-56 is the low-pass filter setting for PID control output. If the
viscous friction of the mechanical system is high, or if the rigidity is low, causing
the mechanical system to oscillate, increase the setting Cn-56 so that it is higher
than the oscillation period. It will decrease the responsiveness, but it will prevent
the oscillation.
(53)
Motor Line-to-Line Resistance R1
(Cn-57)
•
Set the motor’s terminal resistance (including the motor external cable resistance)
in
Ω
unit.
•
The default setting depends upon the type of inverter (but do not include the motor
external motor cable resistance).







































































