






















31
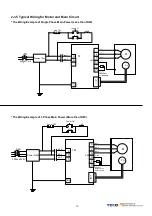
3-2 Trial Operation
Before proceeding with trial run, please ensure that all the wiring is correct.
Trial run description below covers the operation from keypad and also from an external controller such as a PLC. Trial
run with external controller speed control loop (analog voltage command) and position control loop (external pulse
command).
(1) No-load servo motor. Trial run (Reference:4-1)
A. Servo Drive wiring and motor installation
B. Purpose of trial run
P o w e r W in in g
P o w e r W in in g
P o w e r W in in g
P o w e r W in in g
S V
S V
S V
S V ----M o to r
M o to r
M o to r
M o to r
M o tio n T a b le
M o tio n T a b le
M o tio n T a b le
M o tio n T a b le
Confirm if the items below are correct:
.
Drives power cable wiring
.
Servo Motor wiring
.
Encoder wiring
.
Setting servo motor rotation direction and speed
(2) No-load servo motor with a host controller. Trial run (Reference:4-2)
A. Servo drive wiring and motor installation
B. Purpose of trial run
P o w e r W in in g
P o w e r W in in g
P o w e r W in in g
P o w e r W in in g
S V
S V
S V
S V ----M o to r
M o to r
M o to r
M o to r
M o to r T a b le
M o to r T a b le
M o to r T a b le
M o to r T a b le
C o n n e c t to H o s t
C o n n e c t to H o s t
C o n n e c t to H o s t
C o n n e c t to H o s t
C o n tro lle r
C o n tro lle r
C o n tro lle r
C o n tro lle r
Confirm if the items below are correct:
.
Control signal wiring between host controller and servo
drive.
.
Servo motor rotation direction, speed and rotating
number .
.
Brake function, operation limit function and protection
function.
(3) Servo motor connected to load and controlled by a host controller. Trial run (Reference:4-3)
A. Servo drive wiring and motor installation
B. Purpose of trial run
P ow e r W ining
P ow e r W ining
P ow e r W ining
P ow e r W ining
S V
S V
S V
S V ----M oto r
M oto r
M oto r
M oto r
M o tio n T able
M o tio n T able
M o tio n T able
M o tio n T able
C onne ct to H ost
C onne ct to H ost
C onne ct to H ost
C onne ct to H ost
C ontroller
C ontroller
C ontroller
C ontroller
Confirm if the items below are correct:
.
Servo motor rotation direction, speed and
mechanical operation range.
.
Set related control parameters.







































































