





























Chapter 5 Relay Ladder Logic Programming
122
-
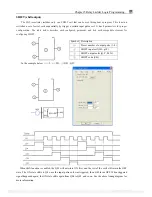
Three types of PID controller:
Proportional loop (P);
Integral loop (I);
Differential loop (D);
(PID controller diagram)
Proportional controller
According to the difference (or error) EV between the target value and measuring value, this alters the adjustable
value (or variables)
Δ
PI proportionally, then change the output (result) PI of the program control. Proportion
controller can work promptly, but it can’t make the difference to 0. The feature of the proportion controller:
Correspond to the change (or variation) of the process value instantly.
PDF compression, OCR, web optimization using a watermarked evaluation copy of CVISION PDFCompressor







































































