


























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
1 4 9
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
M
ODE
C
ONTROLS
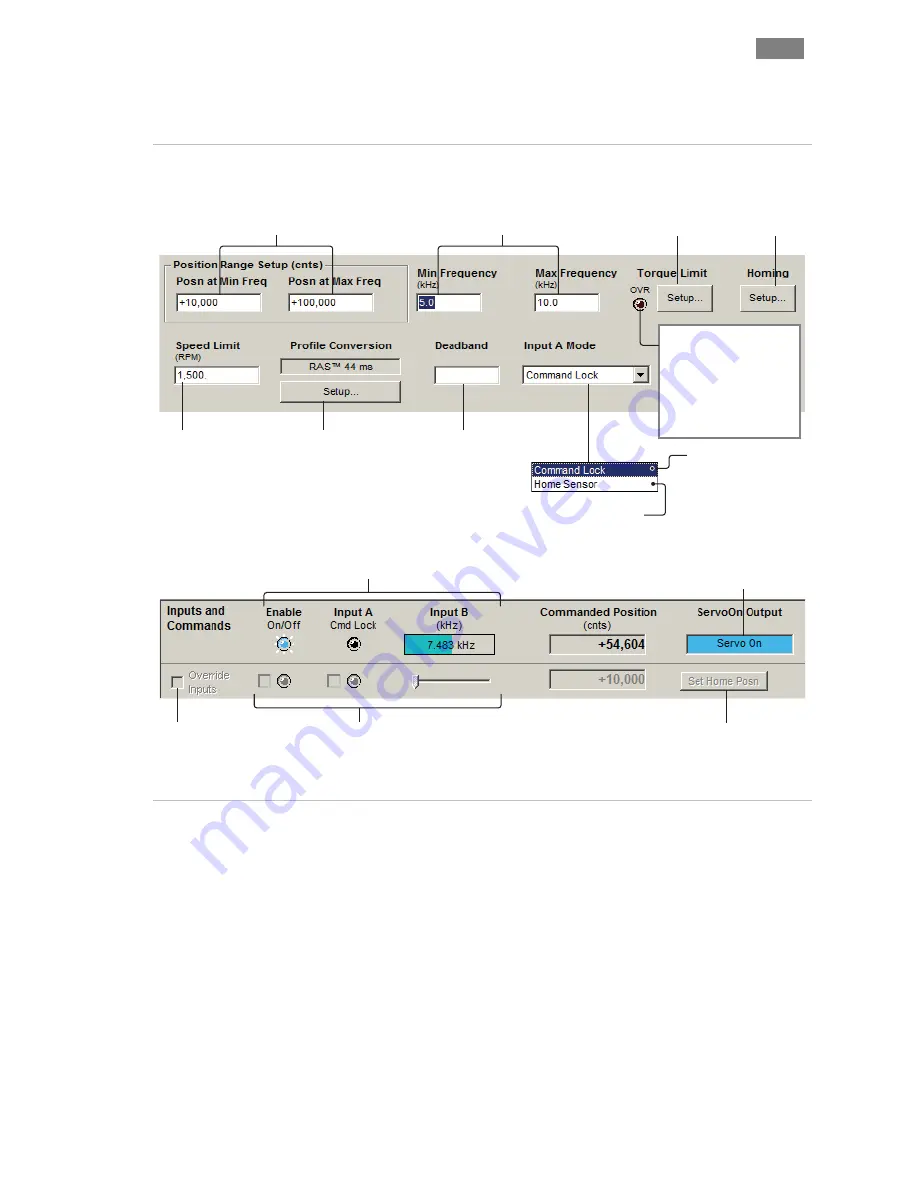
Click during homing
operation to manually
set home position.
Soft Inputs and LEDs
emulate
hardware inputs. For use only
when Soft Controls are active.
Caution: motor may spin when
enabled.
Check to turn on Soft
Controls. Override cannot
be activated when ClearPath
is hardware enabled.
Displays HLFB
output status.
Enter max. desired
motor speed.
Click to open
Homing
Setup dialog.
Click to open
Torque Limit
Setup dialog.
Set Position Range
.
Define the ends of travel
in encoder counts.
Adjust settings for
RAS
TM
(or
optional
g-Stop
TM
) to convert
standard trapezoidal move
profiles into profiles that reduce
noise, resonance, and vibration.
Hardware Input Status LEDs
Light = Input asserted (on)
Dark = Input de-asserted (off)
Torque Override Indicator
When lit, the main torque limit
is being overridden by a
secondary, user-set torque limit
(e.g., when an axis is homing,
the main torque limit may be
overridden by the separate
homing torque limit setting).
(cnts)
1,600
Commanded changes
in position will be
ignored until this
minimum distance is
exceeded. (Prevents
motor hunting due to
command signal dither.)
With
Command Lock
selected (and the input
asserted) ClearPath will
servo to its current
position regardless of
changes made to the
command frequency.
Select
Home Sensor
to use Input A as a
home sensor input.
or
Set Min/Max Frequency
. During operation, motor
position is controlled by Input B signal frequency.
Example; based on setting sbelow, a 10 kHz signal will
command the motor to one end of travel (+100,000)
and a 5kHz signal will command the motor to the
other end of travel (+10,000 counts).







































































