





























AZ3s USER MANUAL
ST.TEC.054
40 / 60
5.
OPERATING MODES
Read carefully the safety precautions reported in chapter 1.3 and in chapter 1.4 before wiring
operations!
AZ3s could support the following operating modes.
Profile velocity mode
Profile position mode
Profile Torque mode
This operating mode follow the specification of DS402. It is possible to commands the drive through
the operating modes using TeMec interface (refer to TeMec interface manual).
5.1.
Profile velocity mode
This operating mode permits the velocity control of the motor also in conditions of load changes.
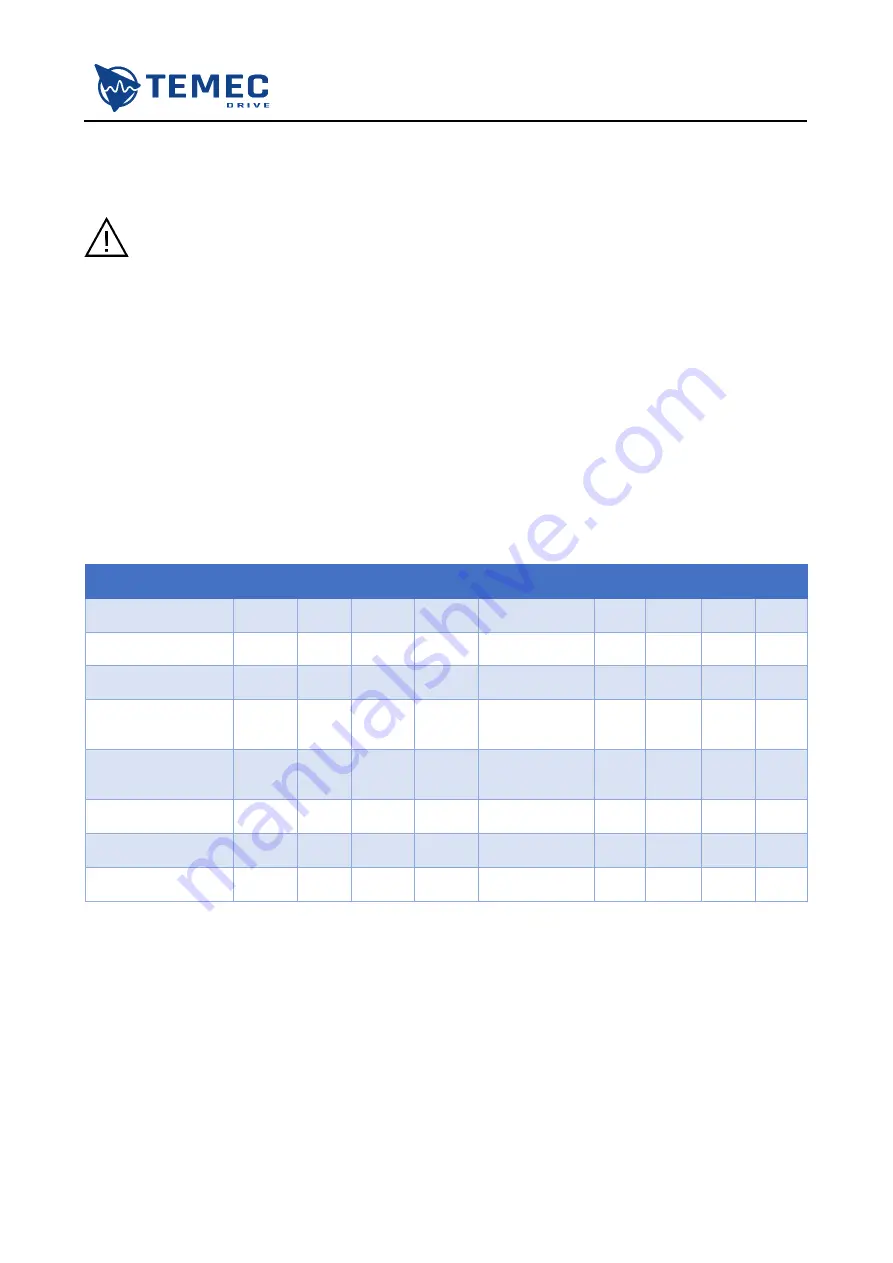
5.1.1.
P
ARAMETERS
Variable
Type
Code
Unit
Default
Range
Can open
address
Modbus logical
address
Control word
UNS16
CM1
-
0
0÷65535
INDEX
SUB
6040h
00h
HR
156
Modes of operation*
S8
CM2
-
3
-128÷127
INDEX
SUB
6060h
00h
HR
157L
Target velocity
S32
CM4
User
units
0
-2.0E6÷2.0E6
INDEX
SUB
60FFh
00h
HR
158
159
Profile acceleration
UNS32
SF2
Speed
user
units/s
1000
0÷2.0E6
INDEX
SUB
6083h
00h
HR
87
88
Profile deceleration
UNS32
PRF1
Speed
user
units/s
1000
0÷2.0E6
INDEX
SUB
6084h
00h
HR
40
41
Invert speed feedback
COIL
DF7
-
0
-
INDEX
SUB
2018h
(bit 6)
COIL
7
Max profile velocity
UNS32
PC7
User
units
3000
0÷2.0E6
INDEX
SUB
607Fh
00h
HR
289
290
Velocity actual value
S32
MV7
User
units
0
-2 E9÷2.0E9
INDEX
SUB
606Ch
00h
IR
124
125
*
This parameter once changed, will become operational only when power stage is disabled.
5.1.2.
C
ONFIGURATION
To control the motor velocity through AZ3s, mode of operations must be set to 3 as defined in DS402
specification.
Target velocity is the velocity set point and can be modified through CAN or Modbus, analog inputs
(refer to chapter 4.4) and digital inputs (refer to chapter 4.5). Max profile velocity can be used in
order to limit the set point velocity that can be set through target velocity (speed limits block in the
image below).







































































