






















Document 57.0300.0200 - 4
th
Edition 07/2000
- Forlì
Page
6
Robot
NAVICELLA PORTAPERSONE / MAN PLATFORM
MODELLO
TYPE
N
°
SERIE
SERIAL N
°
MASSA
WEIGHT
PORTATA NOM.
PAY LOAD
Kg
Kg
ANNO
YEAR
A-1 CONVENTIONAL REFERENCES
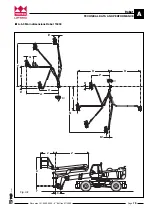
A-1.1 Machine position
Conventionally the machine should be considered po-
sitioned as shown in figure A1.
This convention is necessary to make any reference of
this handbook to different machine parts (front, rear, etc.)
clear and unmistakable.
Any exception to this rule will always be specified.
Fig. A1
LEFT SIDE
RIGHT SIDE
REAR SIDE
FRONT
SIDE
(handler
coupling point)
CONVENTIONAL REFERENCES
A
Summary of Contents for Robot 15000
Page 2: ......
Page 4: ......
Page 6: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 2 Robot Intentionally blank page...
Page 9: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 5 Robot Section A GENERAL INFORMATION...
Page 21: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 17 Robot Section B SAFETY...
Page 25: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 21 Robot Section C OPERATING INSTRUCTIONS...
Page 37: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 33 Robot Section D MAINTENANCE...







































































