






















Document 57.0300.0200 - 4
th
Edition 07/2000
- Forlì
Page
28
Robot
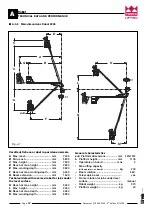
C-4.2 Operating the controls from the platform
The platform control levers have a neutral locking position.
To operate the levers:
1
Seize the lever (fig. C12).
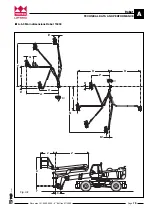
2
Lift the safety catch (fig. C13).
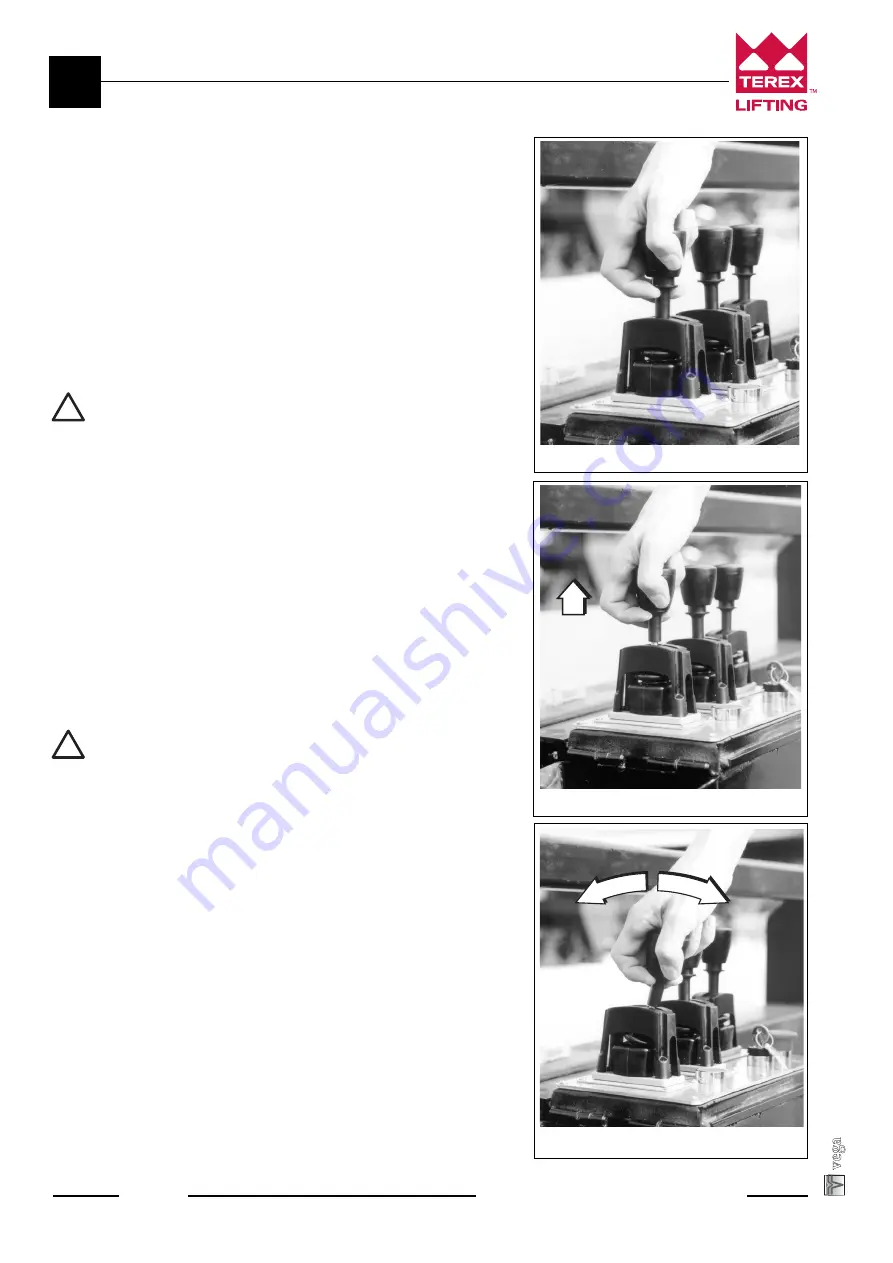
3
Operate the lever as required (fig. C14).
C-4.3 Stopping and storing the equipment
CAUTION
Lay the work platform on a dry and level ground.
To release the robot, proceed as follows:
•
Approach the place where you will release the ro-
bot.
•
Lower the platform on the ground.
•
Turn the switch to position “
0
”.
•
Remove the key.
•
Get off the platform.
•
Step into the driving cab of the handler, insert the
key, removed from the platform control board, into
the
Cabin-Road-Platform
switch and set it to the
“Cabin” position; the green lamp switches off.
CAUTION
Now controls may be operated from the handler
cabin only.
•
Cut out the hydraulic circuit, disconnect the quick
connectors from the auxiliary sockets on the robot
and reconnect the attachment locking hoses (fig. C2).
•
Remove the plug from the socket (fig. C4) and re-
lease the spring catch; close the cover to protect
the socket against dirt and rain.
•
Operate the special control lever to release the ro-
bot from the quick coupling frame.
•
Tilt the coupling frame forward and lower the boom
to release the upper lock of the robot.
•
Move back with the machine.
SETUP
C
Fig. C14
Fig. C12
Fig. C13
Summary of Contents for Robot 15000
Page 2: ......
Page 4: ......
Page 6: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 2 Robot Intentionally blank page...
Page 9: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 5 Robot Section A GENERAL INFORMATION...
Page 21: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 17 Robot Section B SAFETY...
Page 25: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 21 Robot Section C OPERATING INSTRUCTIONS...
Page 37: ...Document 57 0300 0200 4th Edition 07 2000 Forl Page 33 Robot Section D MAINTENANCE...







































































