





























Standard Controller Related Parameter Settings
112
RangePro RPX8-P User Manual
H • Standard Controller Channel Numbers
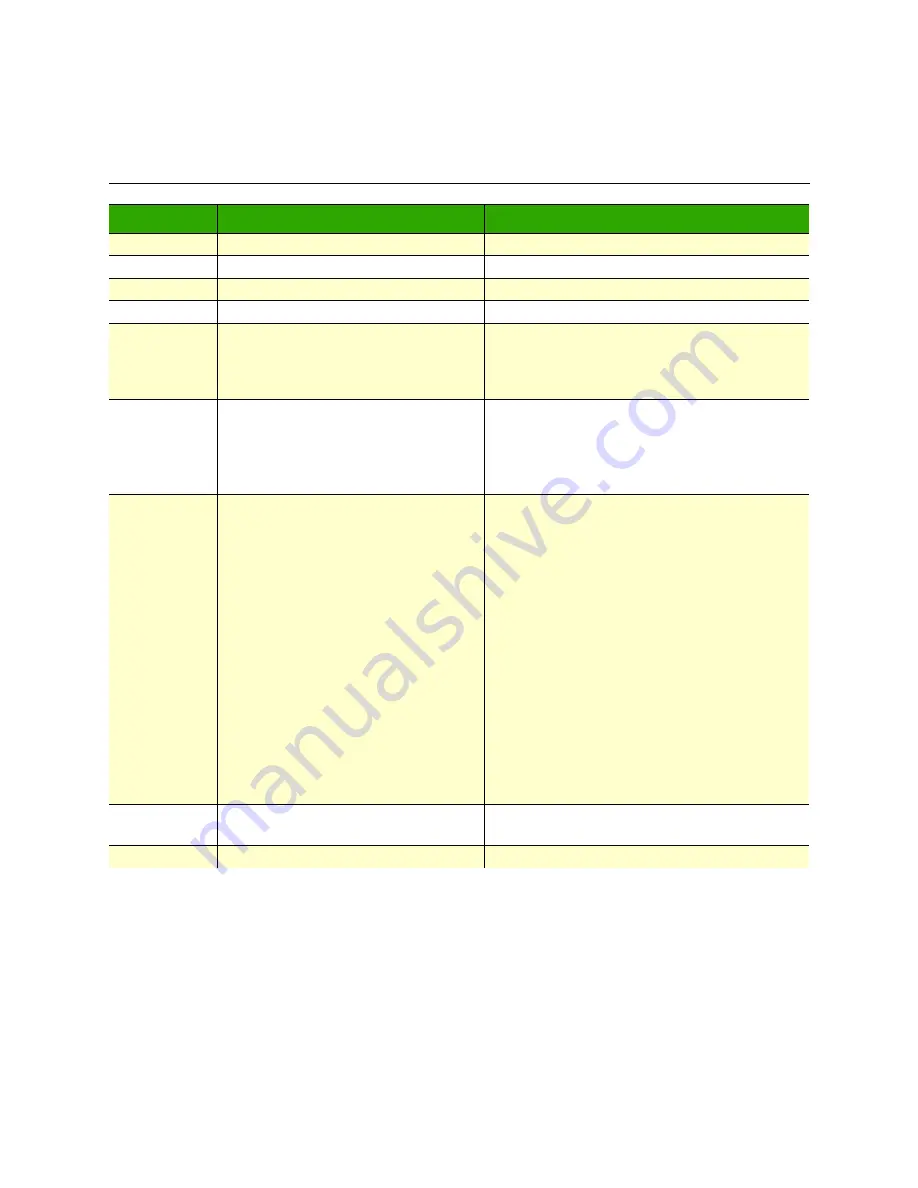
Standard Controller Related Parameter Settings
Channel
Purpose or Example
Ardupilot Settings
1
Yaw Control Gimbal
RCMAP_YAW = 1
,
do not change
2
Pitch Control Gimbal
RCMAP_PITCH = 2
,
do not change
3
Throttle Control Gimbal
RCMAP_THROTTLE = 3
, do not change
4
Roll Control Gimbal
RCMAP_ROLL = 4
,
do not change
5
Flight Mode 3-Pos Switch
FLTMODE_CH = 5
,
do not change
FLTMODE1 = 2
(Alt Hold),
do not change
FLTMODE4 = 5
(Loiter),
do not change
FLTMODE6 = 3
(Auto),
do not change
6
Zoom 3-Pos Momentary Switch or
other…
To use for camera zoom:
Camera dependent
To use for directly driving a servo:
SERVOxx_FUNCTION=56 (RCIN6)
7
Camera Trigger Momentary
CAM_SERVO_ON = 2000
;
do not change
CAM_SERVO_OFF = 1000
;
do not change
CH7_OPT = 9
; forces the Camera Trigger Func-
tion to be activated based on RC7,
do not
change
CAM_DUR = 8
; sets duration that flight control-
ler effectively holds the shutter/camera trigger
button
Specific Settings for FLIR camera
Note
: Servo12 = Aux4, wired to PWM #3 in the
FLIR setup
SERVO12_FUNCTION=10
(Respond to
Camera_Trigger)
SERVO12_REVERSED=0
SERVO12_MAX = 2000
SERVO12_MIN=1000
SERVO12_TRIM=1500
8
RTL 2-Pos Switch
CH8_OPT = 4
(RTL),
do not change
RC8_REVERSED = 0
,
do not change
9
Gimbal Tilt Rotary Dial
MNT_RC_IN_TILT = 9
(RC9),
do not change
Summary of Contents for RangePro RPX8-P
Page 90: ...90 Chapter 12 Contacting TerraView for Support Chapter Contents Support Options 91...
Page 104: ...104 Appendix F LED Meanings Chapter Contents Introduction 105...
Page 119: ...119 Appendix K Configuration Specific Parameters Chapter Contents Load Specific Parameters 120...
Page 121: ...121 Appendix L Making Sense of Motor Tests Chapter Contents Making Sense of Motor Tests 122...
Page 123: ...123 Appendix M Serial Port Assignment Chapter Contents Serial Port Assignment 124...





























































