





























Landing
76
RangePro RPX8-P User Manual
8 • Flight Ops
6.
Monitor the HUD for RangePro RPX8-P system health and continually scan the area of operation for
maximum situational awareness. Look for good GPS signal strength, a good data link signal, battery volt-
age, and other alert notifications that may be displayed on the HUD screen. Be aware of other aircraft in
the vicinity or for personnel that might enter the flight area.
When it is time to return to the take-off point, continue to section
.
Landing
Do the following:
1.
You may command the aircraft to return to land (RTL) manually or automated. (See QGroundControl
and Ardupilot on-line documentation for landing instructions.)
2.
Verify that the landing area is clear of personnel and loose objects.
3.
Announce your landing intentions to others in the area.
4.
If the automated RTL command was given, allow the aircraft to land itself. Keep in mind that the aircraft
might veer off from the exact landing location. Monitor the automated descent and make necessary lateral
adjustments (right control stick) to ensure the aircraft lands in the desired area. With the factory default
parameter settings, the aircraft will:
– Ascend as necessary to a minimum RTL flight altitude (RTL_ALT = 5000 cm)
– Orient appropriately to the landing site (WP_YAW_BEHAVIOR = 0)
– Descend rapidly (LAND_SPEED_HIGH = 200 cm/s)
– Until obtaining landing altitude (LAND_ALT_LOW = 1000 cm)
– Then descend slowly (LAND_SPEED = 50 cm/s)
– Until landing is complete
– At which point the aircraft will disarm
5.
If the UAV is being manually flown, bring the aircraft down slow and steady. There are no ground sensors
(such as a rangefinder) to assist with descent, so you are own your own. Be careful.
6.
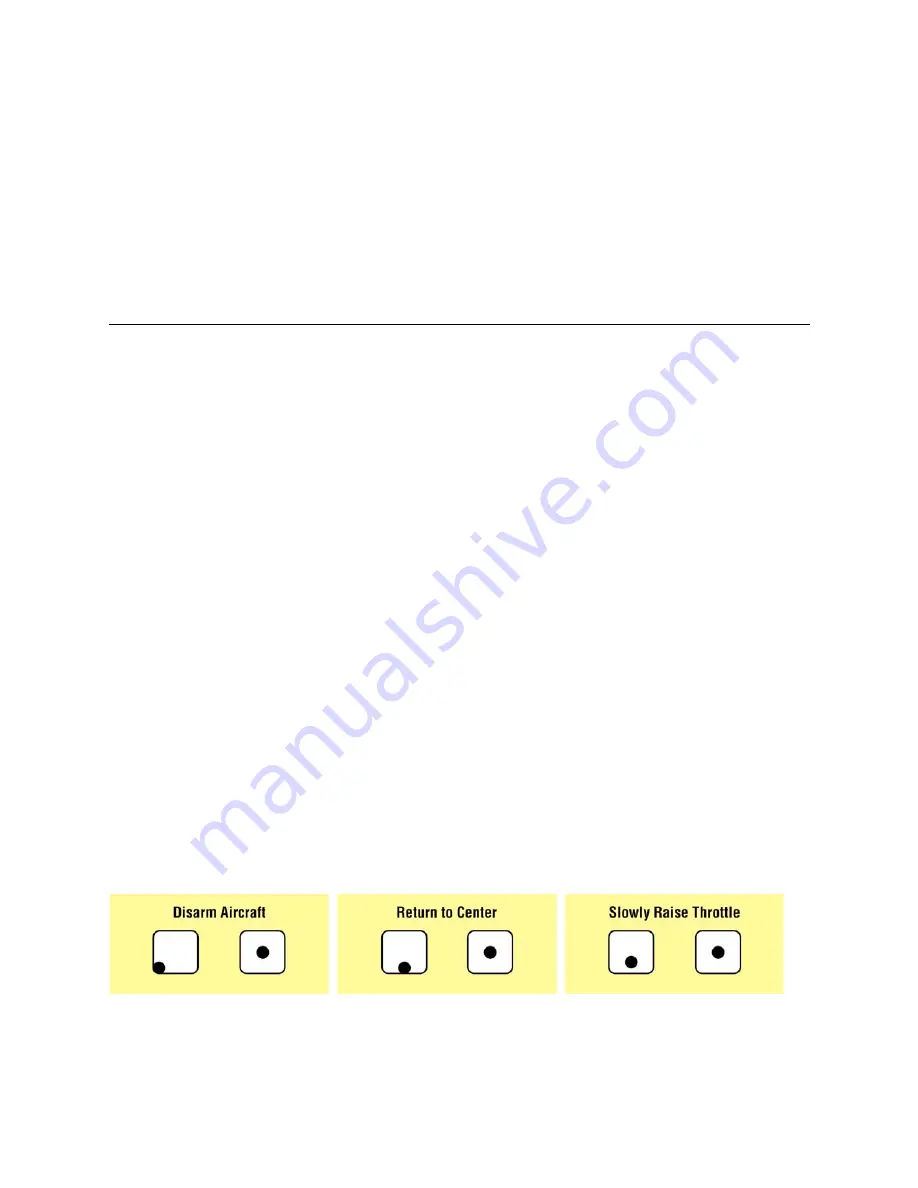
When the aircraft has landed, set the left stick to Full Throttle Down, Full Yaw Left and hold until the air-
craft beeps and QGroundControl announces the aircraft has disarmed (see
Figure 50. Manual Disarming Sequence
Summary of Contents for RangePro RPX8-P
Page 90: ...90 Chapter 12 Contacting TerraView for Support Chapter Contents Support Options 91...
Page 104: ...104 Appendix F LED Meanings Chapter Contents Introduction 105...
Page 119: ...119 Appendix K Configuration Specific Parameters Chapter Contents Load Specific Parameters 120...
Page 121: ...121 Appendix L Making Sense of Motor Tests Chapter Contents Making Sense of Motor Tests 122...
Page 123: ...123 Appendix M Serial Port Assignment Chapter Contents Serial Port Assignment 124...


































































