





























4.13 CAN Interface
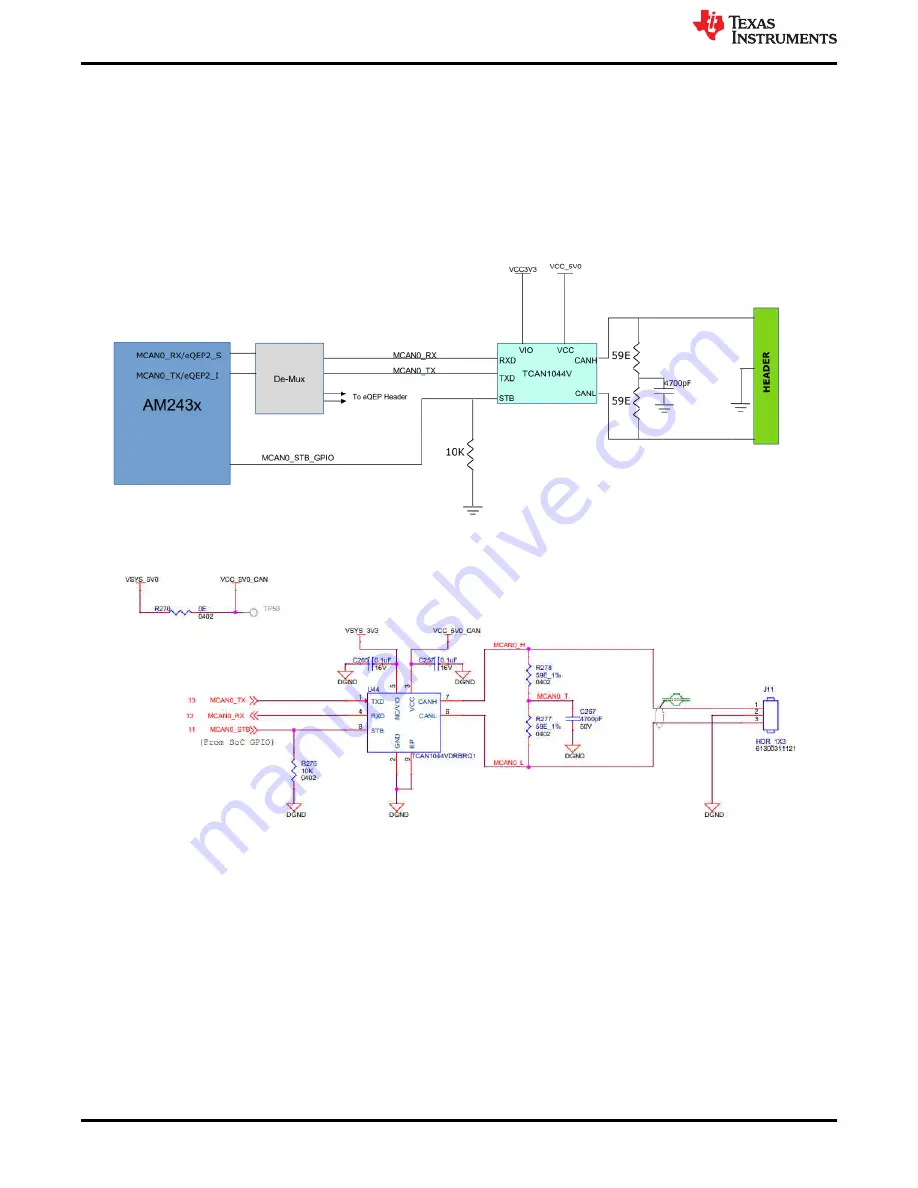
The AM243x LaunchPad supports one CAN interface. MCAN0 signals are multiplexed with eQEP signals
internally. These signals are connected to an on-board demultiplexer, whose select line is controlled by a GPIO
from the SoC, to route the signal to either the MCAN transceiver or the eQEP header.
depicts the
implementation of the CAN interface using a CAN interface IC (TCAN1044VDRBRQ1). The TXD and RXD pins
of the CAN interface IC are connected to the MCAN0_RX and MCAN0_TX pins of the AM243x, respectively. The
STB pin can be directly driven by the AM243x to enable standby mode. When not directly driven by the AM243x,
the 10kΩ pulldown resistor puts the CAN interface IC into normal operation mode. The output of signals for the
CAN transceiver’s high and low are connected to the 3-pin header (J11).
Figure 4-21. CAN Interface
Figure 4-22. MCAN Transceiver and Header
Hardware Description
40
AM243x LaunchPad™ Development Kit User's Guide
SPRUJ12B – AUGUST 2021 – REVISED OCTOBER 2022
Copyright © 2022 Texas Instruments Incorporated







































































