


















SPRAA56
4
DSP/BIOS Real-Time Analysis (RTA) and Debugging Applied to a Video Application
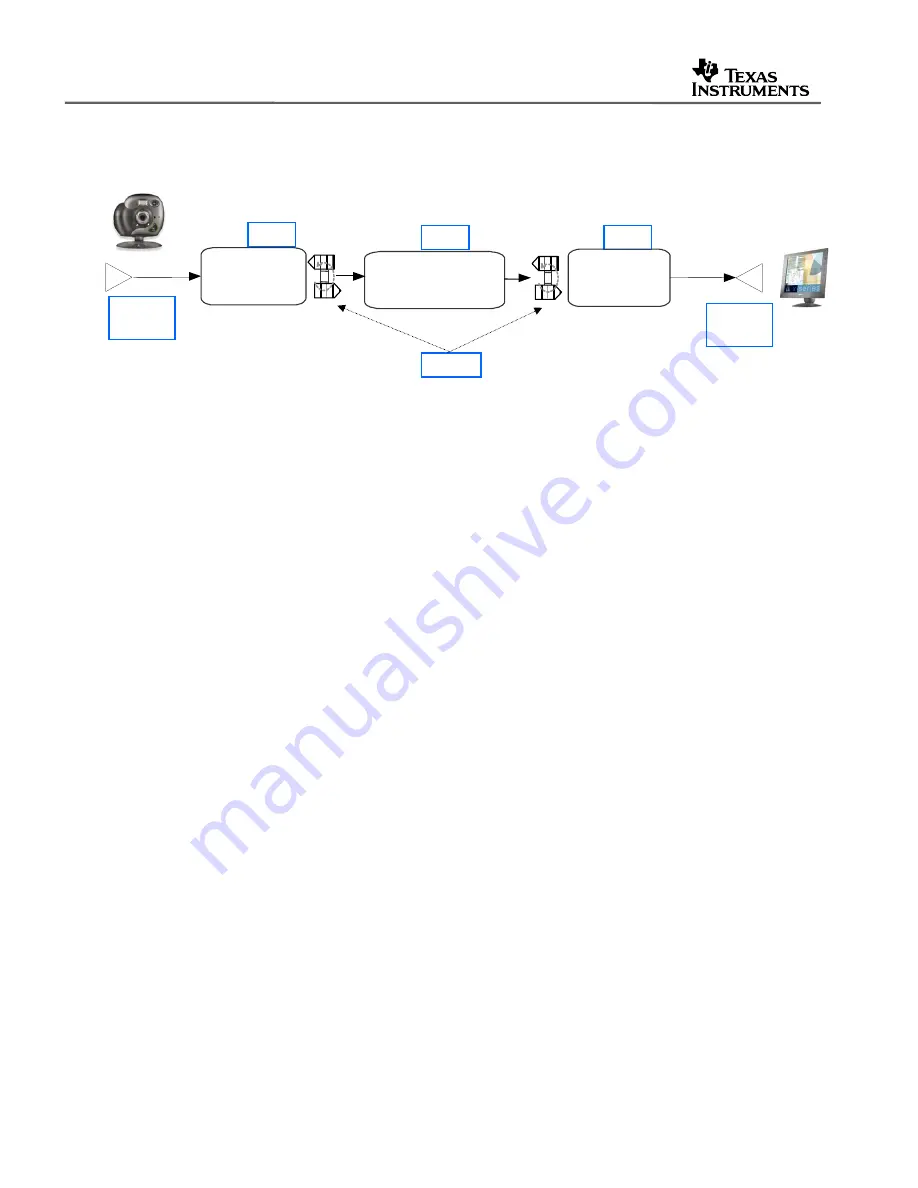
Figure 1 shows a simplified view of the sequential flow of capture, processing, and display tasks
in the application.
Figure 1. Basic Data Flow of the Video Application
Before video data reaches the first stage, it must be converted to digital data, a process that is
managed by the input device driver. Analog video input is converted by an on-board NTSC
decoder chip into a digital bitstream compliant with the BT.656 format with embedded
synchronization. The decoder chip sends the bitstream to the TMS320DM642 DSP’s video port.
A device driver, implementing the IOM interface recommended in the
DSP/BIOS Driver
Developer’s Guide
(SPRU616), is used to manage the initialization and synchronization of the
EDMA channel, the video port, and the NTSC decoder used for video capture.
In Figure 1, TSK refers to a DSP/BIOS task, which is described in detail in the
DSP/BIOS User's
Guide
and the
DSP/BIOS API Reference
. Tasks support blocking calls, which are used to
synchronize the application and the video data stream. The main data flow then has three
stages:
capture
,
processing
, and
display
. Each stage has its own task object.
•
The example’s first stage is a task called tskInput, which runs the tskVideoInput function.
The task receives digital video buffers from the device driver. It then converts the buffers to
the 4:2:0 format from the 4:2:2 formatted data it receives from the driver.
•
The next stage, the tskVideoProcess task, which runs the tskProcess function. The task
includes algorithms that require input data in the 4:2:0 format. The tskInput task sends a
message to the tskVideoProcess task with pointers to the newly formatted data buffers. The
tskVideoProcess task then calls an xDAIS-compliant H.263 encoder algorithm to compress
the data, which is stored in an intermediate buffer. A second xDAIS-compliant algorithm, an
H.263 decoder, is called to decode the data in the buffer.
•
The tskOutput task runs the tskVideoOutput function. It converts the data back to 4:2:2
format as required by the output driver and the NTSC encoder chip, and calls the driver with
the data buffer for display. The output driver is also an eXpressDSP compliant device driver
with the same API interface as the input driver.
Data is passed between the tasks using SCOM messaging objects to pass the pointers and
synchronization semaphore required to ready the output task. The SCOM module is from
Reference Framework 5, which is described in the next section.
TSK
TSK
TSK
SCOM
Device
Driver
Device
Driver
tskVideoProcess
tskInput
tskOutput
Camera







































































