





















Page 14
MLS203 Series XY Scanning Stage
The values quoted above are the maximum values recommended to avoid over
current errors. These values are a guideline only, and depending on the shape of the
mass and the velocities used, these values may require further adjustment,
particularly if the stages are mounted in an XY configuration.
4.4 Position Error Messages.
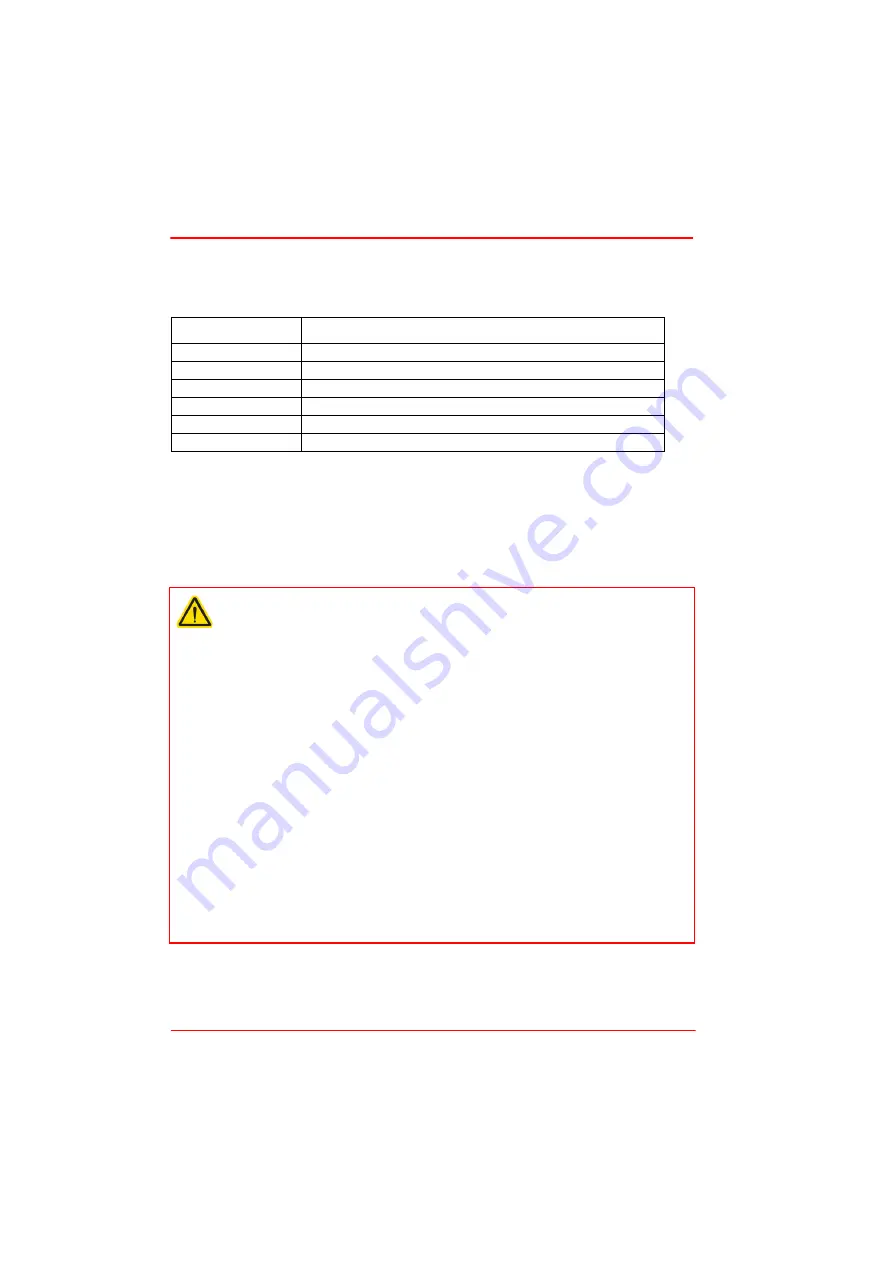
Table 4.2 Load vs Maximum acceleration recommendations
Load (g)
Approximate Max Acceleration (mm/s²)
0
5000
125
2400
250
1550
500
925
750
650
900
500
Caution
The maximum velocity at which the encoder can operate is approximately 400
mm/sec. Above this speed, encoder pulses may be lost and, as a result, the
position readout becomes incorrect. This renders normal operation impossible
because phase commutation of the motor is also based on the encoder reading.
When the stage is controlled by the BBD20x controller, the maximum velocity
is limited to safe values. However, if the output is disabled (with the controller
connected and monitoring the position) and the stage is moved manually at
high speeds, it is possible to exceed this limit. If the BBD20x controller is
subsequently used again to move the stage, the incorrect encoder reading will
cause incorrect operation, often resulting in sudden uncontrolled moves. It is
therefore important not to move the stage excessively quickly when it is moved
manually.
The BBD controller has fault monitoring to detect the loss of encoder pulses. If
this fault occurs, an error message will be generated and the controller must be
powered down and re-started so that correct phasing and commutation can be
established.
If this fault occurs when the stage is being controlled via the MJC001 joystick,
in the absence of a PC, the red LED on the joystick console is lit, and all
operation is suspended until the controller is shut down and rebooted.







































































