
























THE SENSOR BLOCK FACTORY
THE SENSOR BLOCK FACTORY
38
37
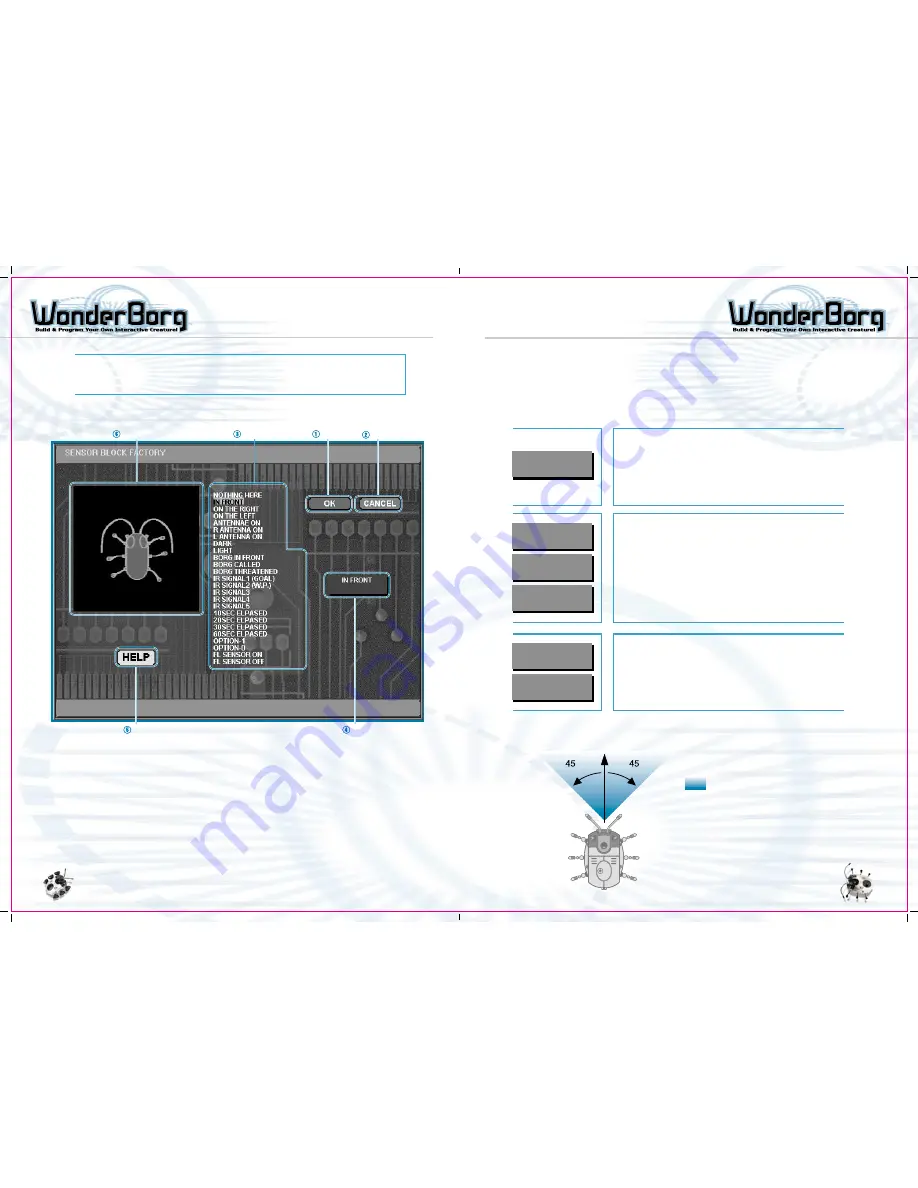
2-1 The Sensor Block Factory
You can move to the Sensor Block Factory screen by clicking "Create sensor block"
at the top of the Panel screen, or by clicking one of the blue squares on the
Panel screen.
Name of Parts
The names of the aparts are shown below. The numbers correspond to the numbered
explanations.
1.
OK:
Sends the created sensor block to the Panel screen.
2.
Cancel:
Returns you to the Panel screen without creating a sensor block.
3.
Sensor List:
List of the sensors that can be set.
4.
Block
Displays the sensor selected from the sensor list.
5.
Help:
Displays a help animation indicating the function of the sensor currently selected. To
stop the animation, click the button again (the text on the button will change to "STOP").
6.
Help screen:
Screen area where the help animation is displayed.
Help Screen
Sensor List
OK
Cancel
Help
Block
(Maximum) area in which robot will react
to infrared signals. The robot will react
to any infrared signal-emitting device
in this area.
Note: The greater the distance between
the robot and the infrared signal-emitting
device, the narrower the angle of the
boundaries the area in which the robot
can detect the signal.
How to Create a Sensor Block
On the Sensor Block Factory screen, select and click the desired sensor from the sensor
list in the middle of the screen. If you then click the "Decide" Button at the top
right of the screen, the Sensor block will be created on the Panel Screen.
Frequently-Used Sensors
The state in which no sensors are reacting is called the
"Nothing Here" state. In this state, the "Nothing Here"
block is triggered. Any command you want the robot to
carry out all the time should be assigned to this sensor.
Note: This sensor should always be used in the last line
of your program.
These sensors react when one or both of the antenna touch
something. There is a sensor block for when the left
antenna touches something, a sensor block for when the
right antenna touches something, another for when both
antennae touch something at the same time, and so on.
The antennae made of plastic-covered wire can be bent
into any shape, so you can bend them to the best shape
for whatever you want the robot to detect.
Some of the sensor blocks use the infrared sensors, such
as "Infrared signal 1 (Guide to goal)" and "infrared
signal 2 (Guide to another robot)". The robot can pick
up infrared signal within a range of about 90 degrees
centered directly ahead.
NOthing Here
Right antenna
Left antenna
Both antenna
Infrared signal 1
(Guide to goal)
Infrared signal 2
(Guide to
another robot)
Area in which Robot can pick up infrared signals






























































