

















CONFIGURATION OF THE WONDERBORG
CONFIGURATION OF THE WONDERBORG
4
3
Interface
The Interface is the device that transmits your programs from the PC to the WonderBorg.
It also sends infrared signals to the WonderBorg transmitting the information you
designed in your program.
Download software
onto PC.
Your computer transmits
Program instructions to
the Interface
The Interface downloads
Program to the WonderBorg
Robot Works
(WonderBorg’s
Software)
WonderBorg
Interface
WonderBorg
The WonderBorg is a robot you assemble yourself. It has feet that can move backwards/
forwards and right / left, various sensors, and its own built-in computer. Its movements
are controlled by programs you can create on your PC.
Robot Works
Robot Works is the WonderBorg’s own programming software. You install this software
on your computer from the CD-ROM included. By simply lining up blocks on your computer
screen, you can create your own programs for the WonderBorg.
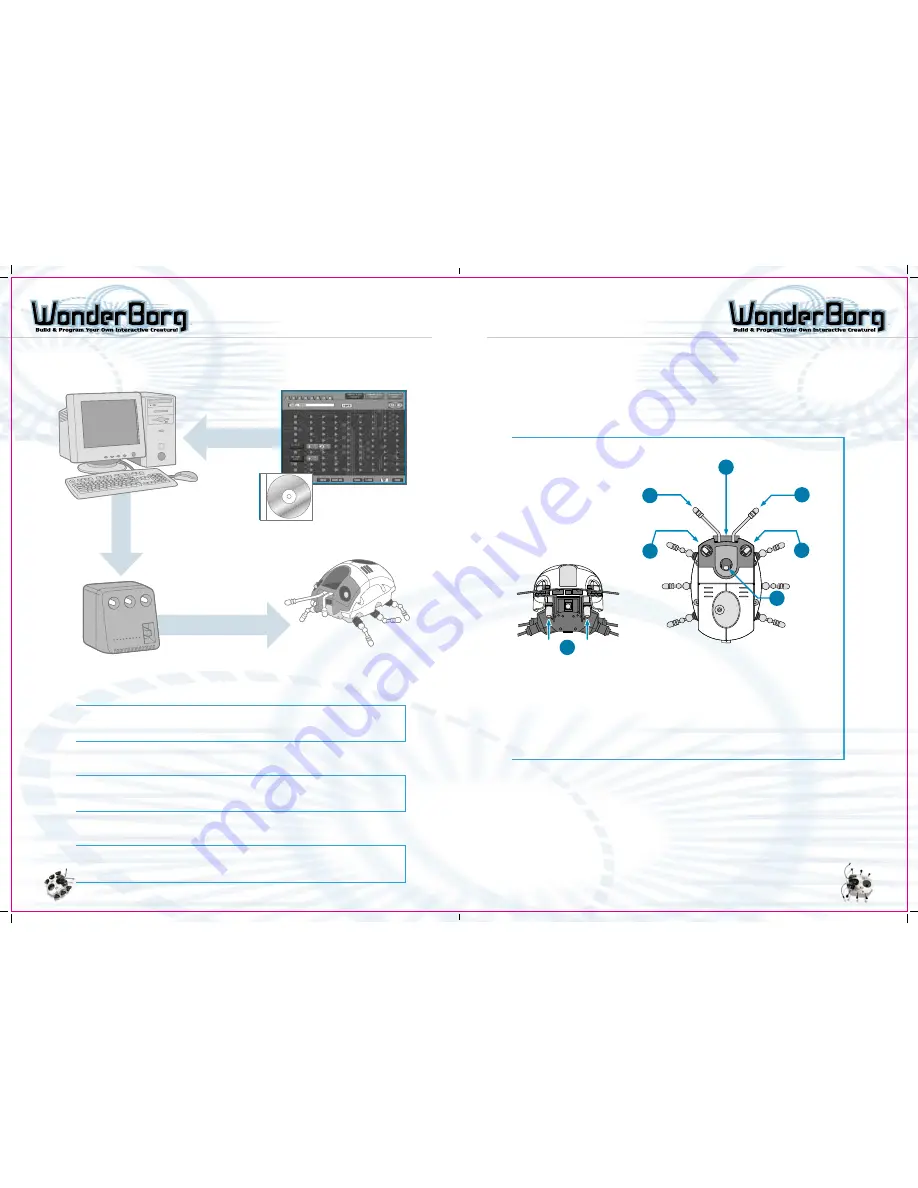
Configuration of the WonderBorg
The WonderBorg's Body
The computer determines how the WonderBorg reacts to information perceived by the sensors.
The left and right legs are moved by their respective motors. When the legs on both
sides move forward, the WonderBorg advances. When the legs on the right move forward
and the legs on the left move backward, the WonderBorg turns to the left.
WonderBorg's Sensors
1. Infrared signal receiver.: Distinguishes infrared signals coming from
the Interface
2. Antenna (right): A sensor in the antenna socket enables the robot to react
when the antenna touches something
3. Infrared LED (right): Used to detect objects up to 20cm away
4. Brightness sensor: Distinguishes between light and dark
5. Floor sensor: Used to decide whether the floor is there or not
6. Infrared LED (left)
7. Antenna (left)
*Also has:
Internal clock sensor: Keeps track of passage of time
Step sensor: Counts how many steps the WonderBorg has walked
The computer links the sensors with the WonderBorg’s movements (i.e. the working of
the right and left motors) in accordance with the program written by the user.
The various sensors are shown below
7
6
1
3
4
2
5


































































