


























UM-11
Cobot Transfer Unit
Fig. 5
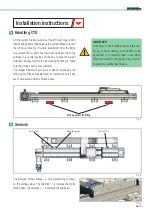
Handling CTU
Lift the system, making sure to set the lift truck forks on both
load bearing beams that make up the system. Make sure that
the lift truck forks are in points equidistant from the fixing
crosspieces that support the load-bearing beam. Place the
carriage in a central position on the axis to keep the weight
balanced. Always monitor the load during handling to make
sure that it does not tip over suddenly.
The images below will give you an idea for positioning the
lifting points. Please consider them as indications only. They
are to help explain what is written above.
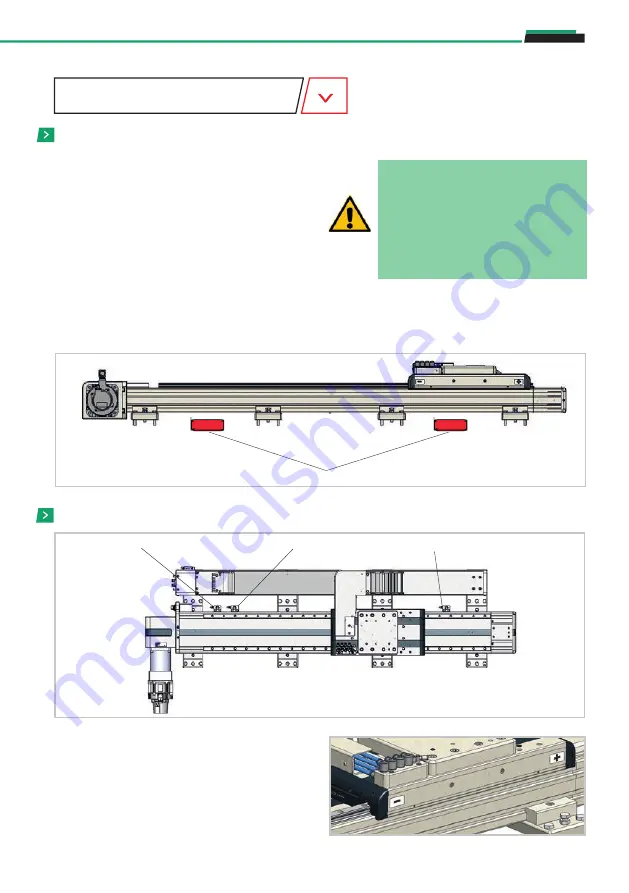
The direction of the carriage -/+ for programming is shown
on the carriage sides. The direction “-” is towards the motor
driving head, the direction “+” is towards the idle head.
Pick up points for lifting
IMPORTANT!
If the mass of the individual pieces totals over
20 kg, to avoid damage or accidents to the
operator(s), it is recommended to use lifting
machines suited to the specific use and ma-
neuvered by qualified technicians.
Installation instructions
Fig. 6
Fig. 7
Sensors
Limit switch 1
Machine homing
Limit switch 2
Summary of Contents for ROLLON CTU 220-1I
Page 2: ......
Page 44: ...UM 42 Notes Notes...
Page 45: ...UM 43 Cobot Transfer Unit Notes...
Page 46: ...UM 44 Notes Notes...
Page 47: ......



































































