





























E6581738
- 19 -
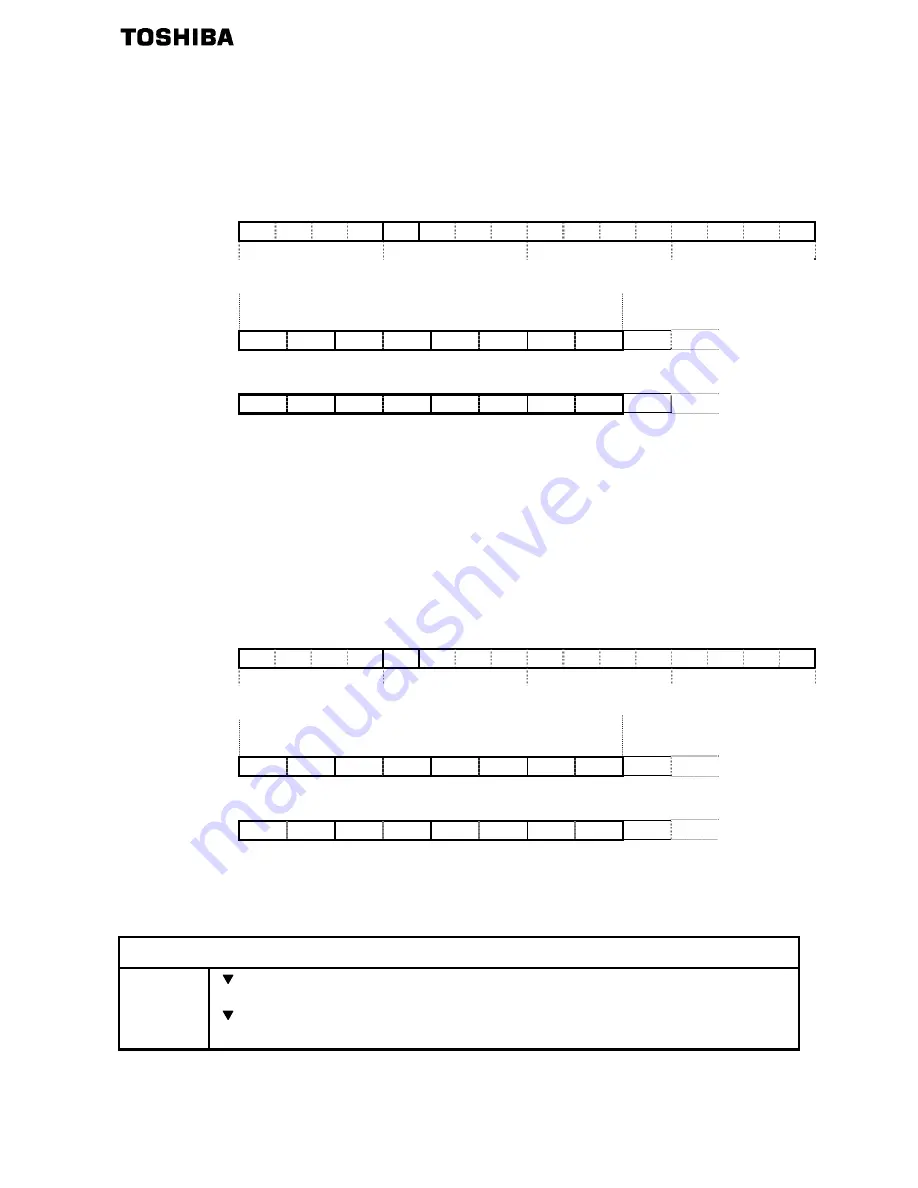
3.7.1.3. Example 3. Reading the status monitor parameter (
fe02
(The operation frequency))
AK = 6 (Request parameter value (array))
SPM = 0
PNU = 1
IND = 0xFE02(
fe02
communication number)
PKE
0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
6 0 0 1
Requirement
PKW PZD
PKE IND PWE
60 01 FE 02
00 00 00 00
・・・
・・・
Response (Value: 0x03E8 (= 1000 -> 10.00Hz))
40 01 FE 02
00 00
03 E8
・・・
・・・
* The status monitor parameter can not be changed.
3.7.1.4. Example 4. Changing the basic parameter (
acc
(acceleration time))
AK = 7 (Change parameter value (array))
SPM = 0
PNU = 1
IND = 0x0009 (
acc
communication number)
PKE
0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 1
7 0 0 1
Requirement (
acc
= 7.0 sec. -> 70 (= 0x0046) *)
PKW PZD
PKE IND PWE
70 01 00 09
00 00
00 46
・・・
・・・
Response
40 01 00 09
00 00
00 46
・・・
・・・
* When the “Acceleration time” is set to 7.0 sec., set the following value.
(The unit of the “Acceleration time” is according to the parameter
f519
.)
7.0/0.1 = 70 = 0x0046 (hexadecimal number)
Notes
When the control power is shut off by the instantaneous power failure,
communication will be unavailable for a while.
The Life of EEPROM is approximately 100,000 times. Avoid writing a command more
than 100,000 times to the same parameter of the drive and the communication board.







































































