






STE 73995
– 13 –
TRANSPORTATION AND INSTALLATION MANUAL
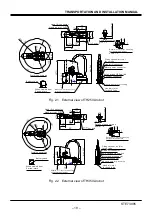
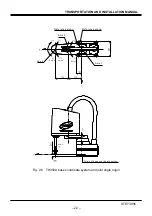
Fig. 1.4 Robot handling area (shaded area) (TH250A, TH350A)
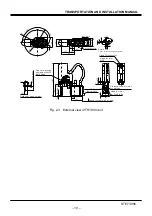
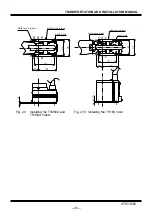
Fig. 1.5 Robot handling area (shaded area) (TH180)
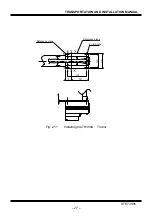
After the installation, remove the clamp used for transport.
Robot harness
Arm 2 cover
Base
Arm 1
Tool shaft
Arm 2
Base
Robot harness
Arm 2 cover
Arm 2
Tool shaft
Arm 1
Summary of Contents for TH180
Page 11: ...STE 73995 10 TRANSPORTATION AND INSTALLATION MANUAL Fig 1 3 Robot package TH180 ...
Page 21: ...STE 73995 20 TRANSPORTATION AND INSTALLATION MANUAL Fig 2 4 External view of TH350A T robot ...
Page 80: ...STE 73995 79 TRANSPORTATION AND INSTALLATION MANUAL APPROVED BY CHECKED BY PREPARED BY ...