

















MAINTENANCE MANUAL
101
STE 85357
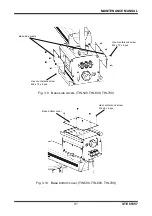
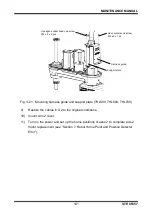
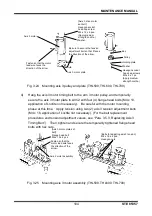
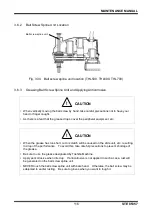
Fig. 3.21 Mounting harness guide and support plate (THL500, THL600, THL700)
9)
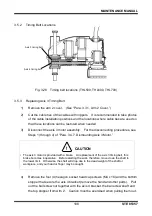
Restore the cables in A 2 to the original conditions.
10) mount Arm 2 cover.
11) Turn on the power and set up the home positions of axes 2 to complete axis 2
m
otor replacement (see “Section 7, Robot Home Point and Position Detector
Error”).
Hexagon socket head cap screw
M4 x 8 x 2 pcs.
Harness guide
Support plate
Hex countersunk screw
M4 x 8 x 1 pc.







































































