


























MAINTENANCE MANUAL
217
STE 85357
6.3.3
Battery Replacement
The memory equipped on the X8YC printed board of the robot controller is backed up
by a lithium battery to save the data. Replace the battery every five (5) years. The
lithium battery will turn its life when used for a predetermined time. If it is used,
neglecting the life, the battery voltage will drop to below the voltage required for
keeping the memory data, resulting in the data being lost and faults caused by
leakage of the battery liquid.
If the following alarm has occurred, replace the battery with a new one.
• 1–145
MAIN Battery alarm
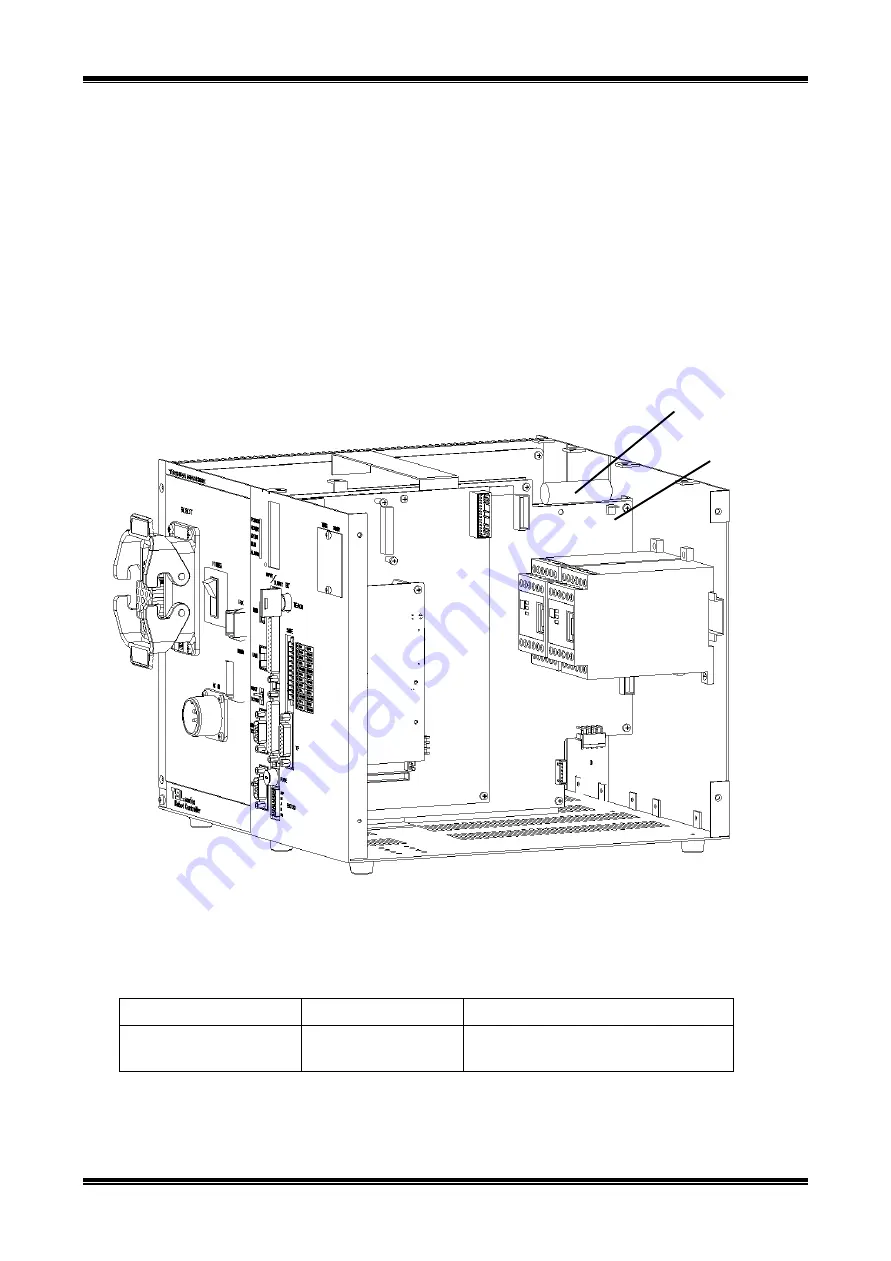
Fig. 6.5 Location of lithium battery (TSL3000E)
Table 6.2 Battery replacement (TSL3000E)
Type of battery
Manufacturer
Battery service life
ER6C WK27
Hitachi Maxell
10 years
(at room temperature)
CN4
Lithium battery




































































