

























MAINTENANCE MANUAL
253
STE 85357
completely understand the descriptions carried in “Section 8, Robot Home Point and
Position Detector Error
.”
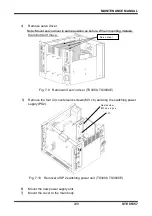
8.4
About Home Position
Home position what need at the moment of home position setting is shown. When the
robot is moved to home position about 1 axis, 2 axis or 4 axis, suit to home point
match-marks. S
ee “Para. 8.4.1 to 8.4.3, Locations of Robot Home Point Match-Marks.”
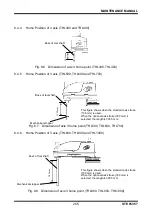
The 3 axis of robot don
’t have home point match-marks. See “Para. 8.4.4 to 8.4.6,
Home Position of 3 axis
” and move to that position.
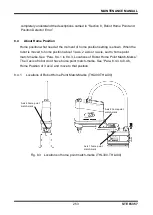
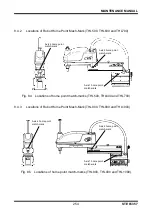
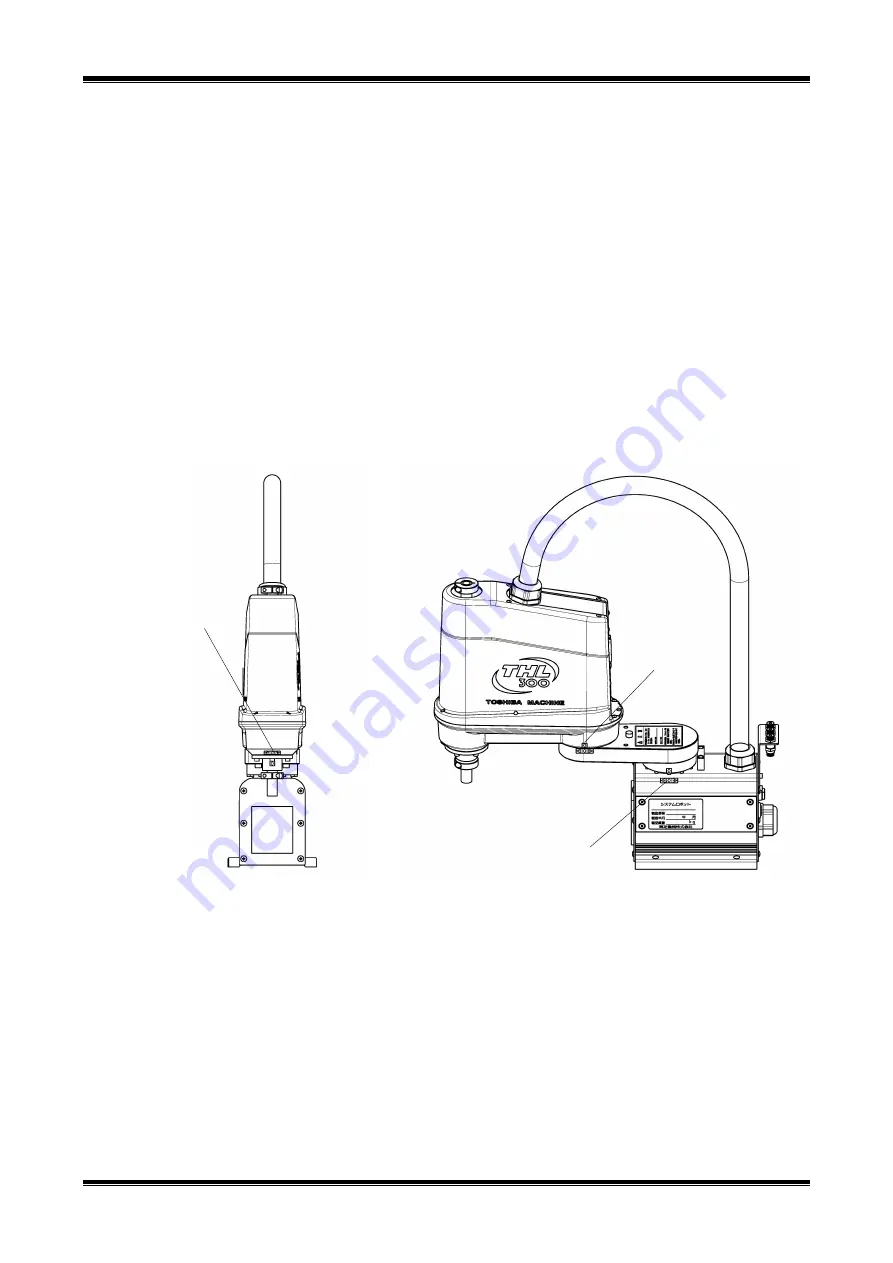
8.4.1
Locations of Robot Home Point Match-Marks (THL300,THL400)
Fig. 8.3 Locations of home point match-marks (THL300, THL400)
Axis 4 home point
match-mark
Axis 2 home point
match-mark
Axis 1 home point
match-mark







































































