





























E6581595
F-34
6
4) Adjusting the PID control gain level
Adjust the PID control gain level according to the PID set value, the feedback value and the object to be
controlled.
The following parameters are provided for gain adjustment:
Title Function
Adjustment range
Default setting
Proportional gain (P)
0.01 - 100.0
0.30
Integral gain (I)
0.01 - 100.0
0.20
Derivative gain (D)
0.00 - 2.55
0.00
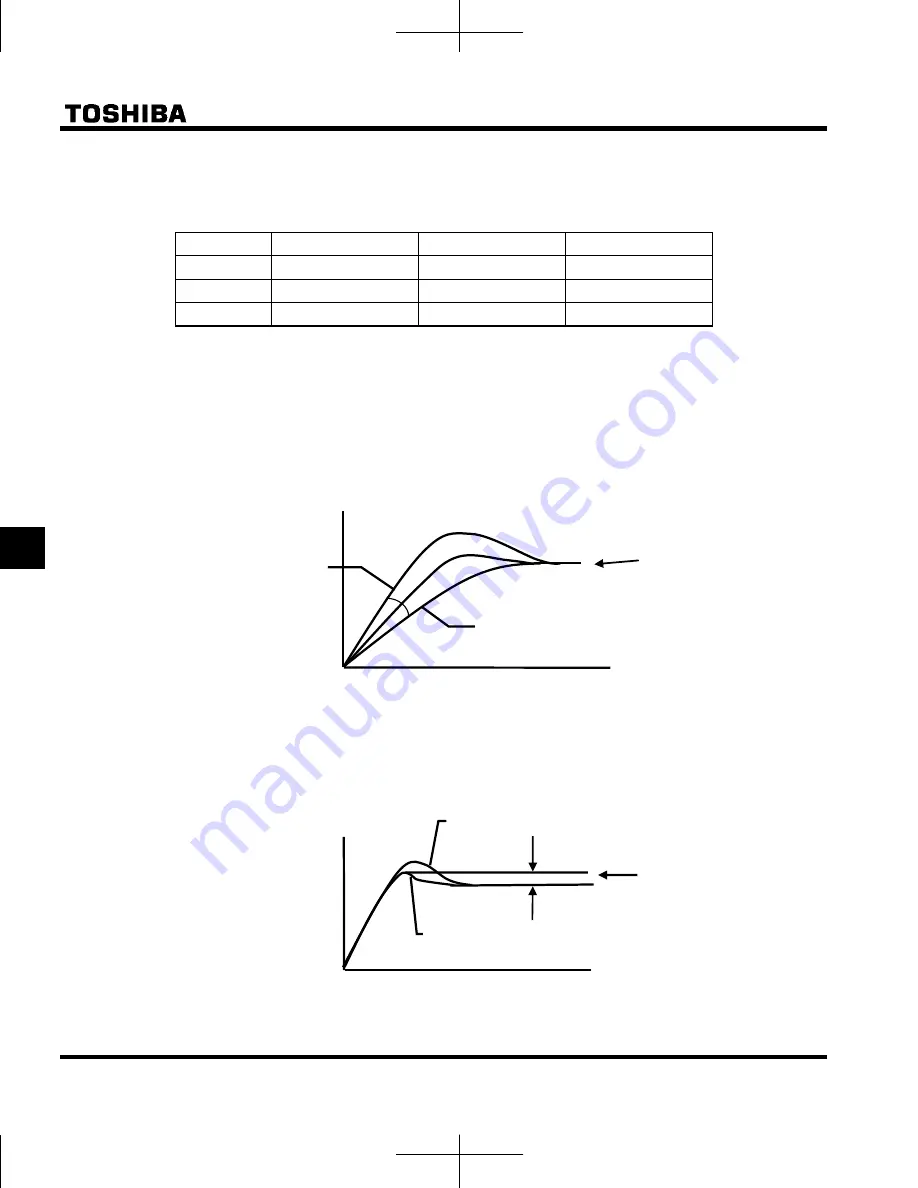
(P-gain adjustment parameter)
This parameter adjusts the proportional gain level during PID control. A correction value proportional to
the particular deviation (the difference between the PID set value and the feedback value) is obtained
by multiplying this deviation by the parameter setting.
A larger P-gain adjustment value gives faster response. Too large an adjustment value, however,
results in an unstable event such as hunting.
(I-gain adjustment parameter)
This parameter adjusts the integral gain level during PID control. Any deviations remaining unremoved
during proportional action are cleared to zero (residual deviation offset function).
A larger I-gain adjustment value reduces residual deviations. Too large an adjustment value, however,
results in an unstable event such as hunting.
Assign the terminal function number 52 (PID integral/derivative) to an input terminal, when the input
terminal is ON, it is possible to calculate integral/derivative amounts always as 0 (zero).
(
f363
=
Large gain)
(
f363
=
Small gain)
PID set value
Output frequency
Residual deviation
Time
PID set value
Output frequency
Time
Fast response
(
f362
=Large
gain)
Slow response
(
f362
=small gain)







































































