





























E6582233
F-40
6
★
Assign an input terminal function 52 (PID integral/derivative) to an input terminal, when that input
terminal is ON, it is possible to calculate integral/derivative amounts always as 0 (zero).
(D-gain adjustment parameter)
This parameter adjusts the differential gain level during PID control. This gain increases the speed of
response to a rapid change in deviation (difference between the process value and the feedback value).
Note that setting the gain more than necessary may cause fluctuations in output frequency, and thus
operation to become unstable.
★
Assign an input terminal function 52 (PID integral/derivative) to an input terminal, when that input
terminal is ON, it is possible to calculate integral/derivative amounts always as 0 (zero).
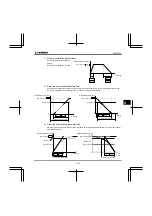
5) Adjusting feedback input
To use external feedback input (VI), perform voltage-scaling adjustments (input point setting) as required.
Refer to section 6.6.2 for details.
If the feedback input data is too small, voltage-scaling adjustment data can also be used for gain adjustment.
Example of 0 - 10 Vdc voltage input
setting (
)
Example of 0 - 5 Vdc voltage input
setting (
)
Example of 4
–
20 mAdc current input
setting (
)
High differential gain
Low differential gain
Previous deviation-current deviation
Feedback value
Time
Feedbac
k v
al
ue
(60Hz)
(0Hz)
0V
0%
5V
100%
Feedbac
k v
al
ue
(60Hz)
(0Hz)
0V
0%
10V
100%
Feedbac
k v
al
ue
(60Hz)
(0Hz)
4mA
20%
20mA
100%







































































