





























– 31 –
STE 71282
STARTUP MANUAL
[4] Enter teach point name "P1" and press the EXE key.
P 1
w / . w o r l d
S A V E
D E D I T
F U L L
T R A N S
P Y L D
>
[5] Teach point name "P1" has been registered.
P O I N T
X
Y
Z
P 1
=
0 ,
0 ,
0 ,
w /
. w o r l d
S A V E
D E D I T
F U L L
T R A N S
P Y L D
>
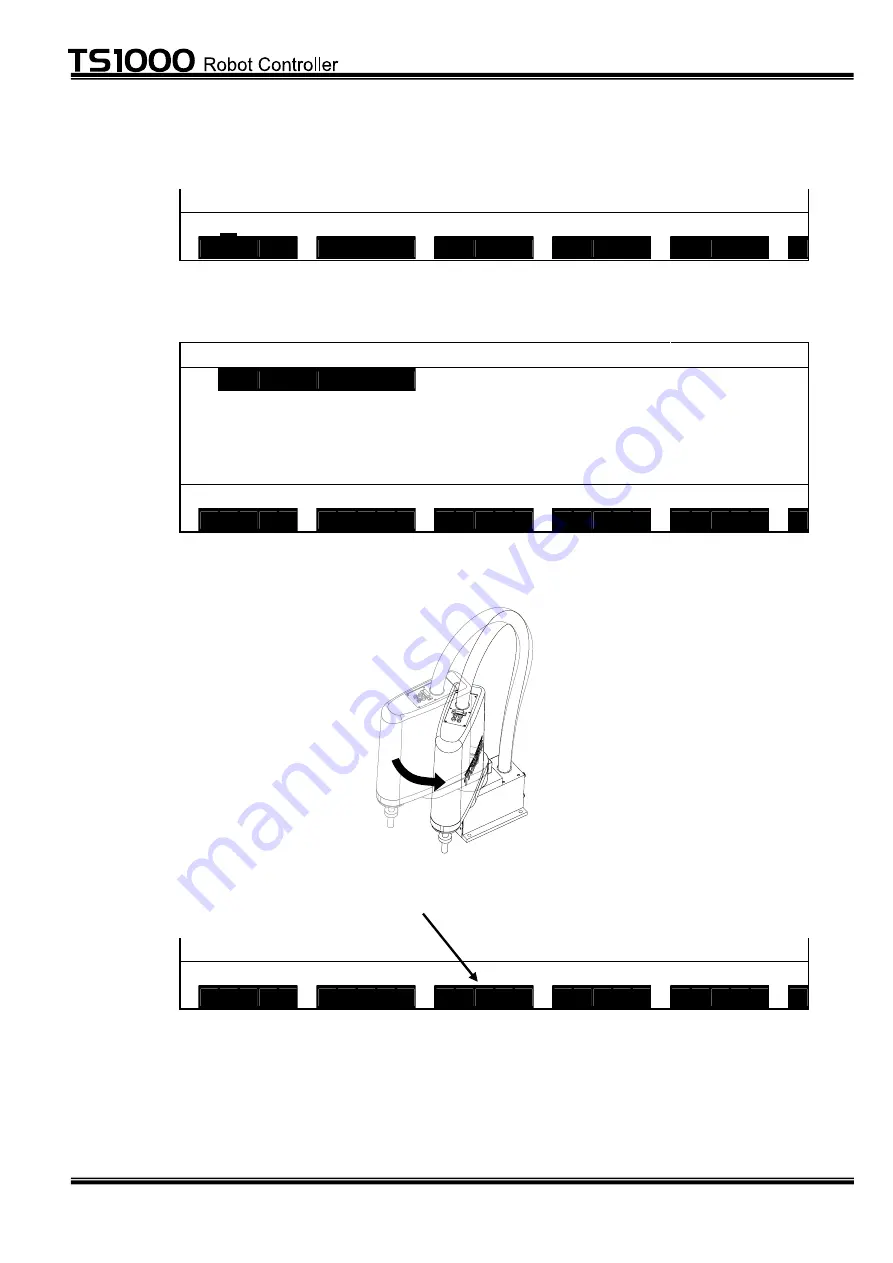
[6] Manually guide the robot to the position you wish to teach.
[7] Press the NEXT key to display [TEACH].
w /
. w o r l d
N O S A V
F I N D
T E A C H
M – T O
C U T
>
P1







































































