


























Specifications
W7B ASD Installation & Operation Manual
https://www.toshiba.com/tic/
199
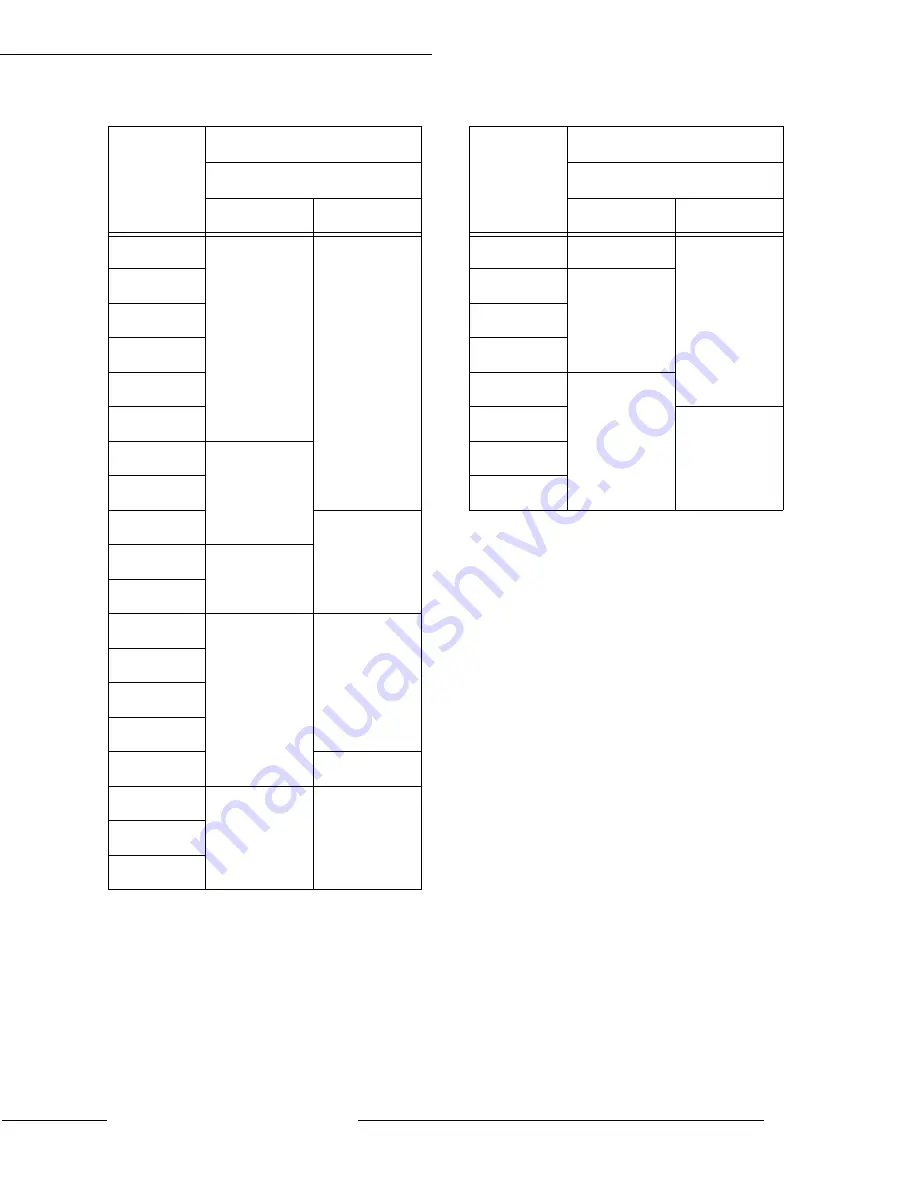
Table 21. 460-Volt Lug Capacities.
Table 22. 690-Volt Lug Capacities.
Model
Lug Size Range
AWG or kcmil
Input
Output
4220
14-3/0
2x 14-2/0
4270
4330
4400
4500
4600
4750
3/0-350
410K
412K
6-350
415K
2x 2-500
420K
425K
3x 3/0-500
2x 4-500
430K
435K
440K
450K
2x 2-600
460K
4x 3/0-500
5x 3/0-500
470K
480K
Model
Lug Size Range
AWG or kcmil
Input
Output
610K
4-4/0
1/0-350
612K
3/0-350
615K
617K
620K
2x 2/0-500
625K
2x 2-600
630K
640K
Summary of Contents for W7 DN-57442-006
Page 1: ...ADJUSTABLE SPEED DRIVES W7 DN 57442 006 INSTALLATION OPERATION MANUAL June 2020 ...
Page 2: ......
Page 3: ...Document Number 57442 006 Date June 2020 W7 ASD Installation and Operation Manual ...
Page 4: ......
Page 60: ......
Page 221: ......







































































