























42
The GyroTrac sensor must be located as close to
level in pitch and roll as possible, with its long
axis parallel to the vessel’s centerline (see
Figure 18 on page 11). If you are unable to mount
the sensor according to these guidelines, follow
these steps to set offset values to compensate for
minor variances in the sensor’s pitch, roll, and
yaw.
NOTE: The maximum offset for pitch and roll is ±45º.
The maximum offset for yaw is ±180º.
Step 1 - Note the Reported Pitch and Roll
First you need to determine the pitch and roll
values that the sensor is currently reporting.
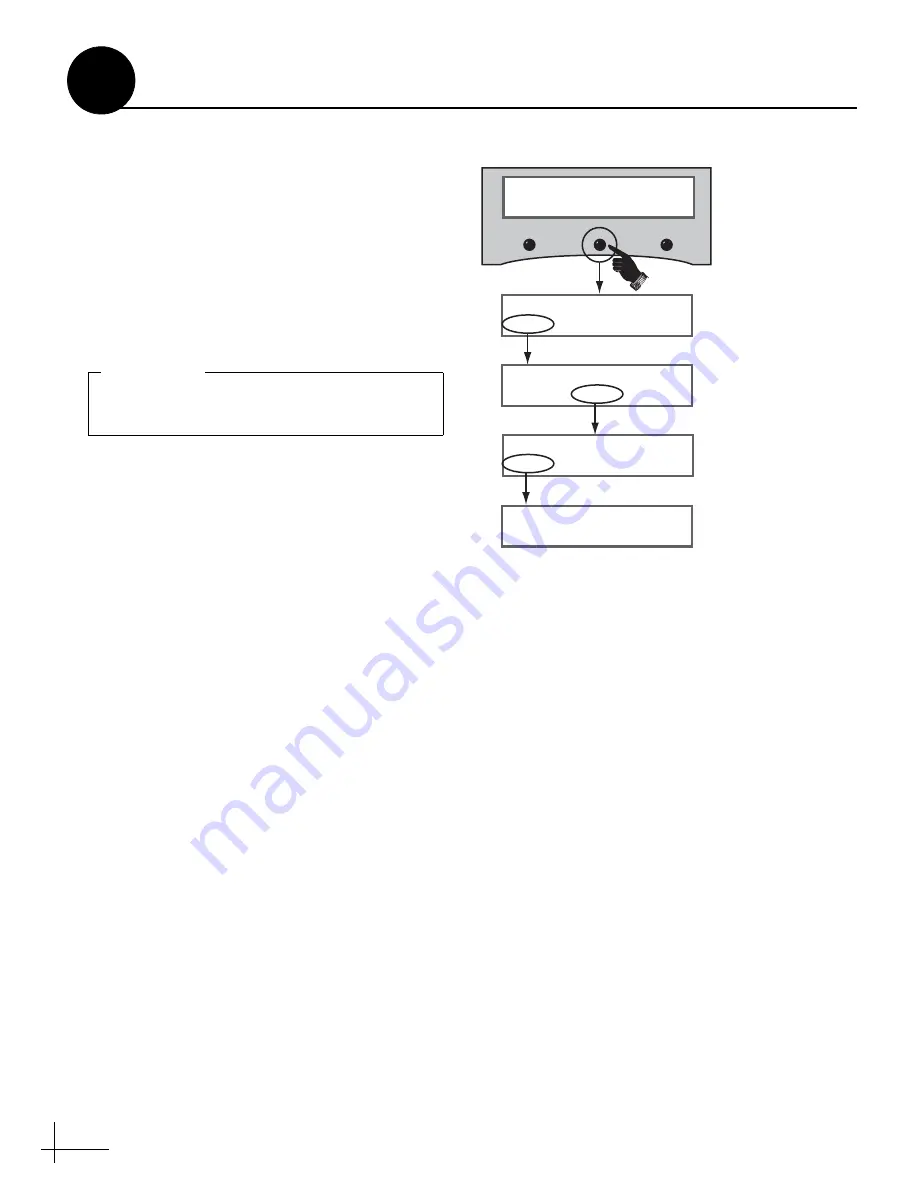
1. Press the center MENU button on the ADCU
to access the onscreen menu (see Figure 61).
2. At “Setup display type?”, press ENTER.
3. At “Compass?”, press NEXT until the display
shows “Pitch, Roll & Yaw.” Then press YES.
4. Write down the reported pitch and roll, but
reverse the sign (for example, a positive
number becomes negative). These are the
offsets you need to enter for pitch and roll in
the next step.
This procedure must be performed while the
vessel is stopped in calm water.
IMPORTANT!
Setup display type?
Enter Next Return
Menu
Compass?
Yes Next Return
Pitch, Roll & Yaw?
Yes Next Return
Pitch
Roll
Yaw
#.#°
#.#° #.#°
Figure 61: Pitch, Roll & Yaw Display on ADCU
Entering Sensor Offset Values
E







































































