





























117
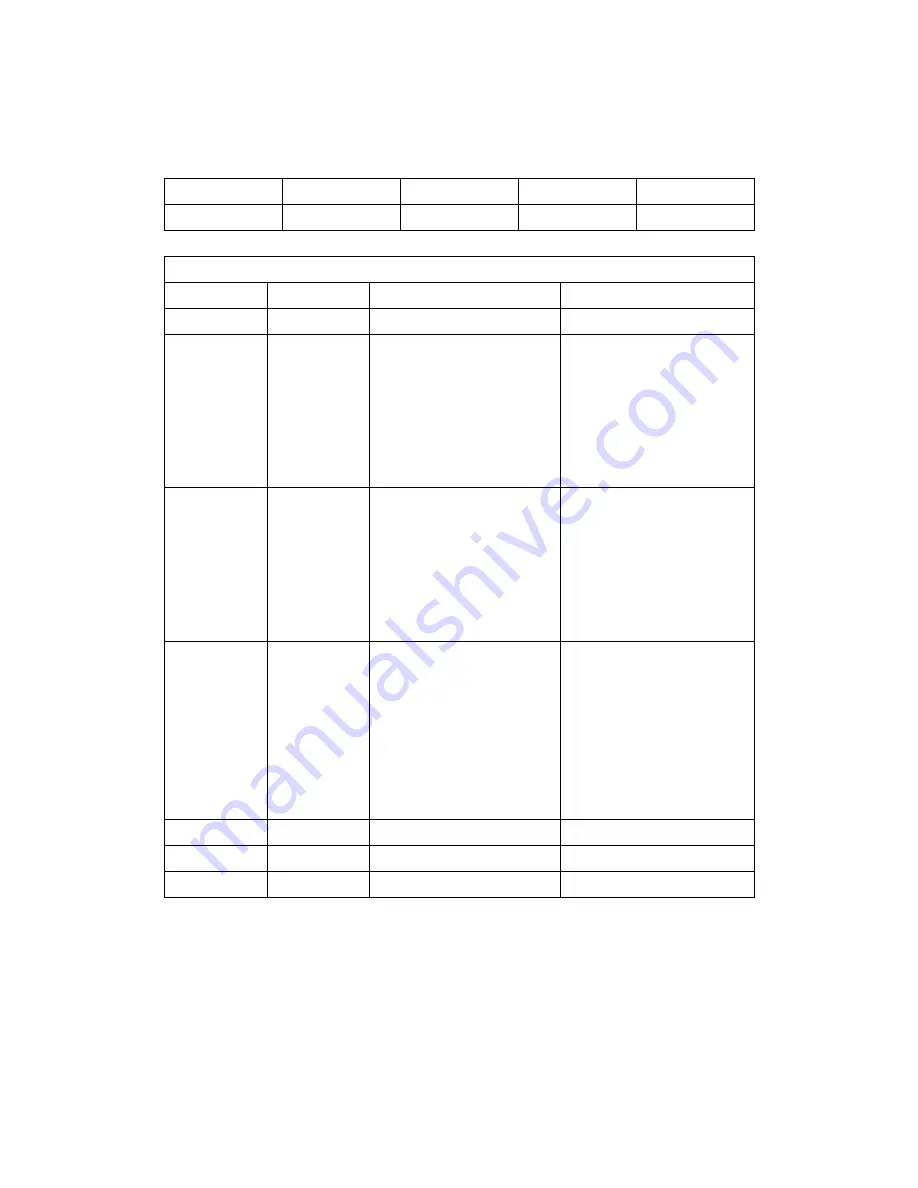
NAV – STATUS (0x01 0x03)
It periodically polls navigation status.
Header ID
Data
Length
Data
Checksum
0xB5 0x62
0x01 0x03
16
See below
CK_A CK_B
Data
Offset bytes
Format
Descriptions
Notes
0
U4
GPS time of week (ms)
4
U1
Navigation modes
0x00 – no fix
0x01 – dead reckoning
0x02 – 2D fix
0x03 – 3D fix
0x04 – GPS + dead reckoning
0x05 ~ 0xFF – reserved
5
U1
Flags
0x01 – GPS fix ok (under DOP
and accuracy masks)
0x02 – DGPS used
0x04 – week number valid
0x08 – time of week valid
the rest of them – reserved
6
U1
Differential status
Bits[1:0] – DGPS input status
00 – none
01 – PR+PRR correction
10 – PR+PRR+CP correction
11 – high accuracy PR+PRR+CP
correction
the rest of bits – reserved
7 U1
Reserved
8
U4
Time to first fix (TTFF)
Millisecond time tag
12
U4
Millisecond since startup/reset





































































