






















PD-013-42 / TMCM-110-42 Manual (V1.24/2011-NOV-25)
10
Copyright © 2011, TRINAMIC Motion Control GmbH & Co. KG
7
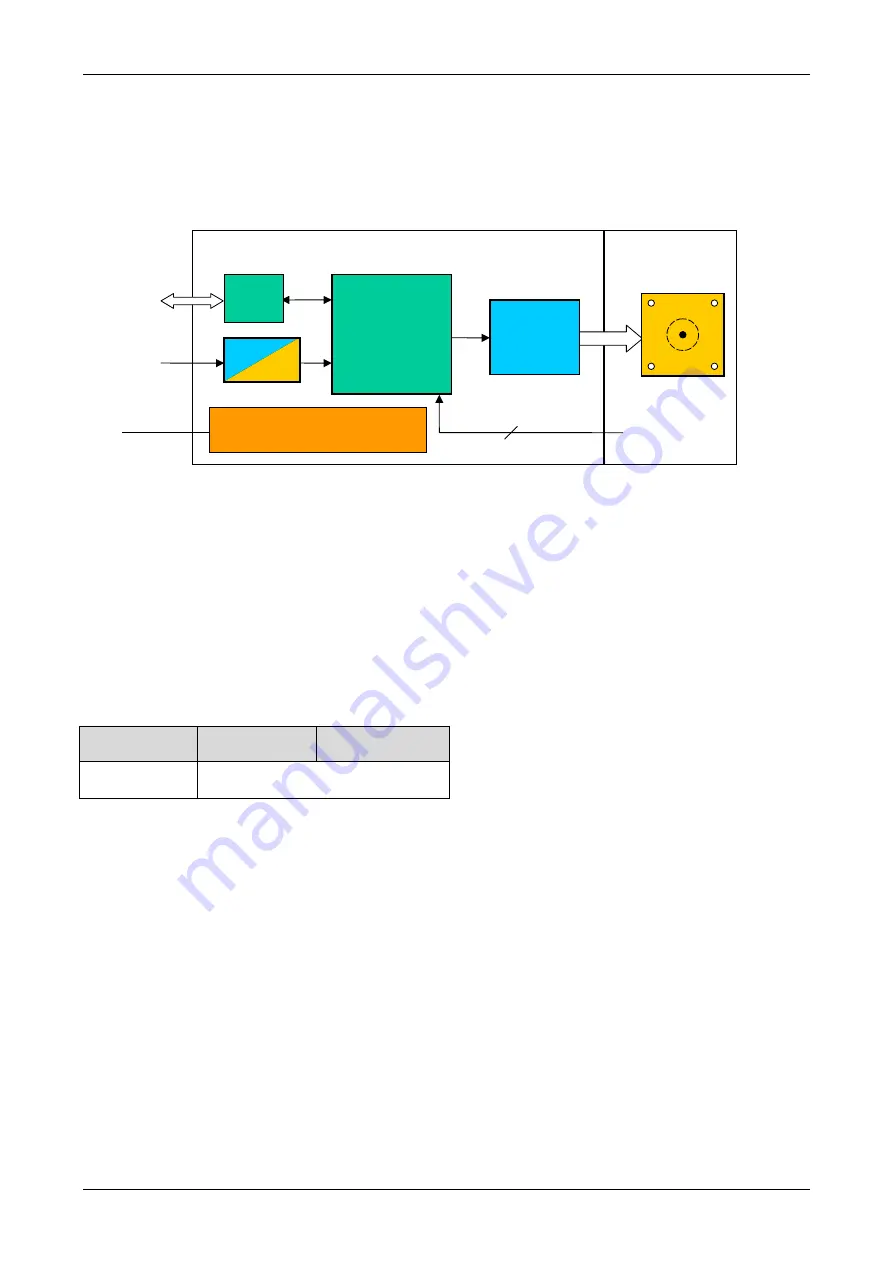
Functional description
The TMCM-013 module has three different modes to control a stepper motor: step/direction, RS485 and
eventually pseudo DC-mode. With the RS485 it is possible to change parameters and save them to the
EEPROM of the module to have all options in any mode. Therefore there are different settings (like microstep
resolution) possible in step/direction mode, also.
Figure 7.1: Main parts of PD-013-42
7.1
Disable
The disable works as an emergency shutdown. Connected to ground all power to the motor will shut down
independent of the current settings.
It is in the user’s responsibility to stop the step impulses or set the velocity to zero before enabling the
motor again, because it starts abrupt otherwise.
Function Table:
V
OPTON
open wire
V
OPTOFF
motor disabled
motor enabled
7.2
RS485 interface
The RS485 interface can control all functions of the TMCM-013. It is possible to change parameters, with this
interface which are also valid in the other modes like max. velocity or acceleration. The parameters can be
written to the EEPROM to obtain the changes after a restart.
A
reset to factory default
is possible. Default address byte is
A
and default baud rate is 9600 baud. This
mode can only be used with an appropriate RS485 interface. Commands are sent with a terminal program.
Please refer to the start-up, please
PD
-
013
-
42
REF
-
Switches
2
Driver
TMC246
programmable
Sequencer
RS
-
485
5V Power
Supply
7..30V DC
Opto
isolation
Step
Motor
Step
/Dir







































































