























PD-013-42 / TMCM-110-42 Manual (V1.24/2011-NOV-25)
14
Copyright © 2011, TRINAMIC Motion Control GmbH & Co. KG
7.2.1.6
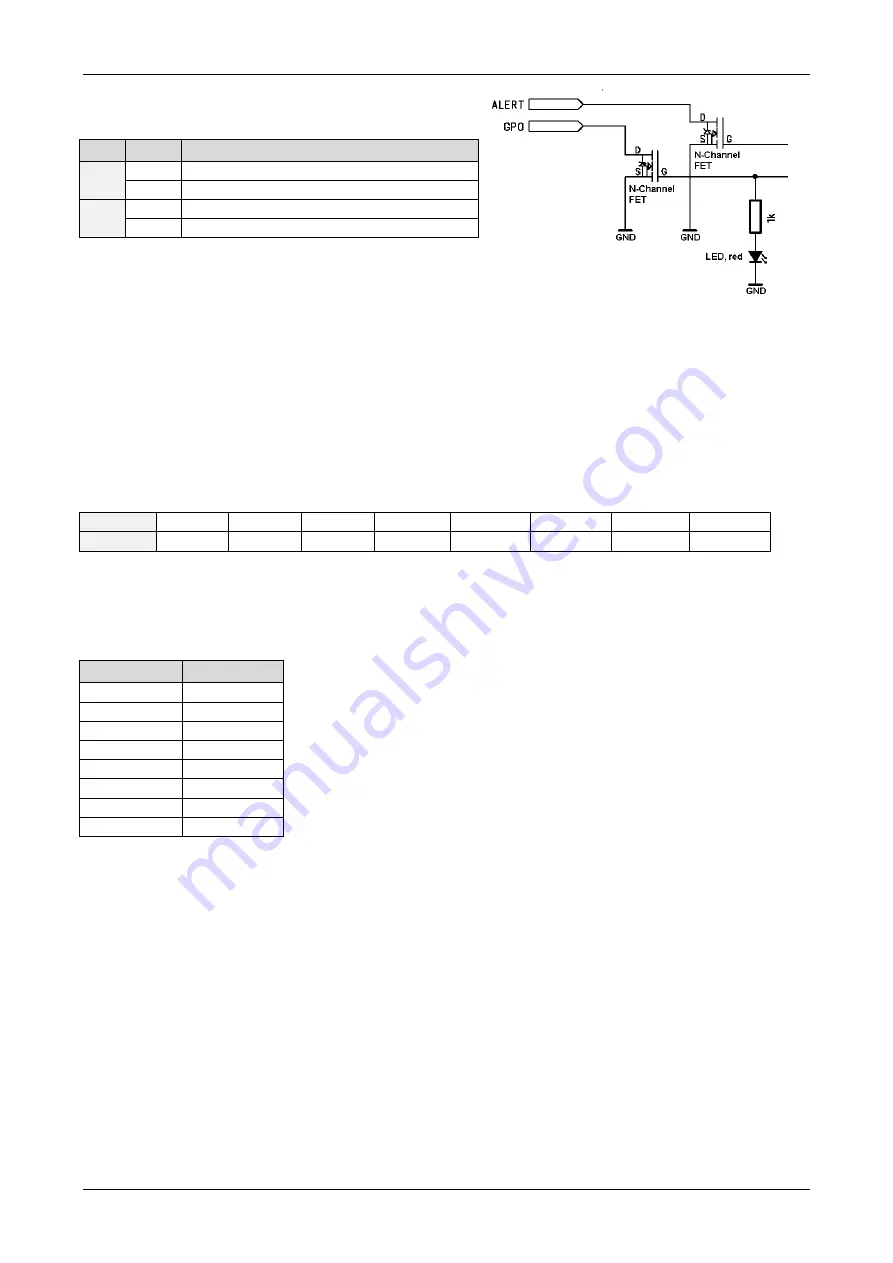
Output setting (O)
The bit settings are as follows:
Bit Value Description
0
0
0: GPO inactive (LED off)
1
1: GPO active (LED on)
1
0
No function
1
Output is changed at end of reference run
Table 7.7: Output adjustment
Figure 7.2: Alarm and GPO
7.2.1.7
Set position (P), read current position (R)
The position value of the motor can be changed by the command
P
. When changing this value just the
motors positioning counter is changed. The motor does no according movement. The actual position can be
read out by the command
R
.
7.2.1.8
I/Os readout (Q)
Command:
AQ
ENTER
Bit
7
6
5
4
3
2
1
0
Port
0
0
0
GPI
REF_A
REF_B
GPO
ALARM
Table 7.8: I/Os Readout
7.2.1.9
Baud rate (U)
The parameter
U
changes the baud rate of the module for RS485 communication.
Parameter U
Baud rate
0
9600 baud
1
14400 baud
2
19200 baud
3
28800 baud
4
38400 baud
5
57600 baud
6
76800 baud
7
115200 baud
Table 7.9: Baud rate







































































