

























Tel/Fax: 0755-82734836
www.dh-robotics.com
14
Basic control registers
: initialization, force setting, reference position, speed, and some
states.
Configuration registers
: gripper’s parameter configuration. Includes Modbus
communication parameters and I/O parameters.
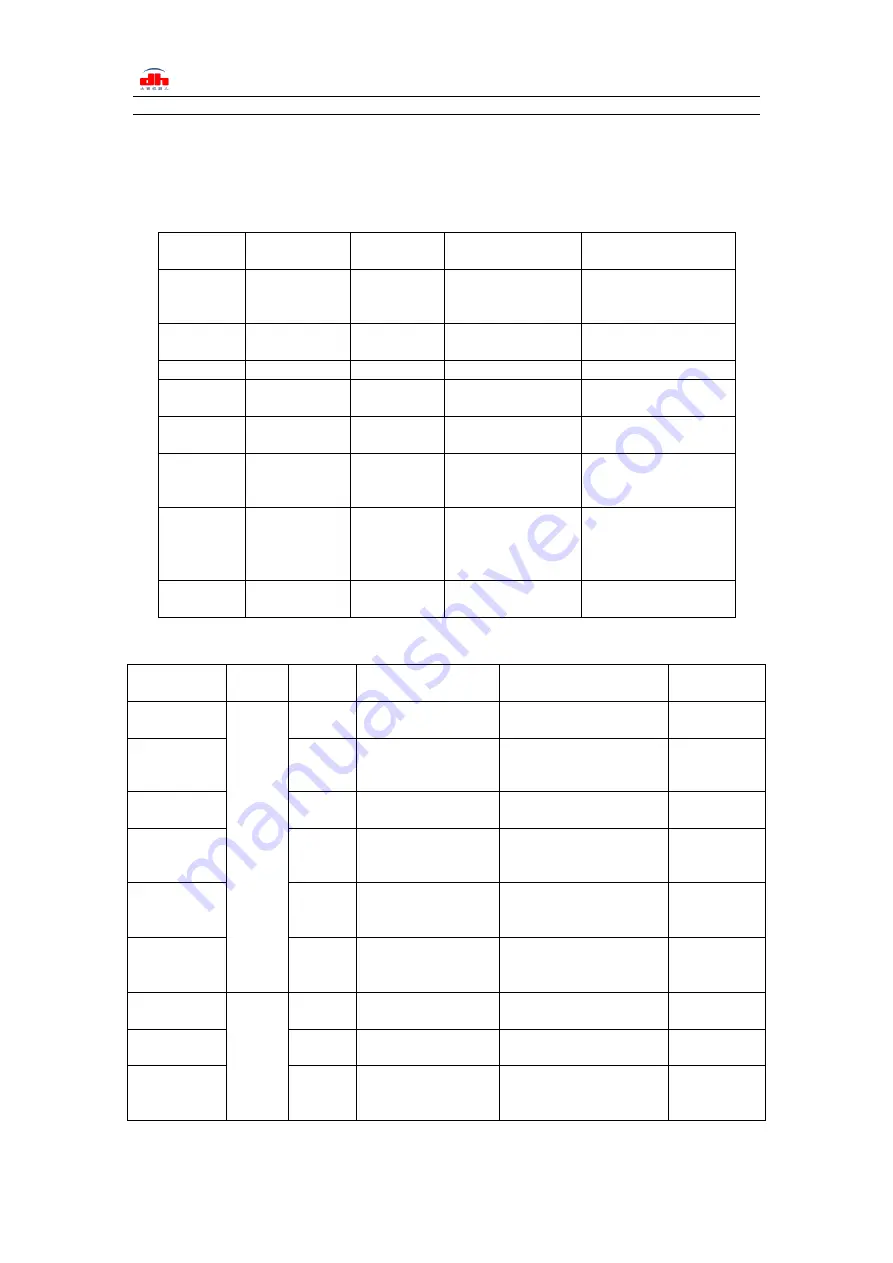
Table 2.2 Basic Control register map
Function
address
(hexadecimal)
Description
Write
Read
Initialization
256
(
0x0100
)
Initialize the
gripper
0x01
:
initialization
;
0xA5:
Fully initialization
Current setting
Force
257
(0x0101)
Gripper’s
force
20-100 (%)
Closing-force
currently set
-
-
-
-
-
Position
259
(
0x0103
)
Position
0-1000 (
‰
)
Reference position
currently set
Speed
260
(
0x0104
)
Speed
1-100 (%)
Speed
currently set
Initialization
state
512
(
0x0200
)
Initialization
state of the
gripper
Read Only
0
:
Not initialized
;
1
:
Initialized
Gripper state
513
(
0x0201
)
Gripper state
Read Only
0
:
In motion;
1
:
Reach position
;
2 Object caught
;
3
:
Object dropped
Position
514
(
0x0202
)
gripper
position
Read Only
Current real-time
position
Table 2.3 Configuration register map
Function
High
byte
Low
bytes
Description
Write
Read
Save
Parameter
0x03
0x00
Save all the parameters
0
:
default
,
1
:
Write all
parameters to save
0
Initialization
direction
0x01
Configure
initialization direction
0: Open
,
1:Close
(default: 0
)
Current setting
Slave Address
0x02
Configure gripper
Modbus address
0-255 (default: 1
)
Current setting
Baud Rate
0x03
Configure gripper
Modbus Baud rate
0-5
:
115200
,
57600
,
38400
,
19200
,
9600
,
4800
(
default :0
)
Current setting
Stop Bits
0x04
Configure gripper
Modbus stop bits
0
:
1 stop bit
;
1
:
2 stop bits
(
default: 0
)
Current setting
Parity
0x05
Configure gripper
Modbus Parity
0: None parity;
1: Odd parity;
2: Even parity (default: 0)
Current setting
I/O Parameters
Test
0x04
0x00
Test I/O parameters
1
;
2
;
3
;
4
Current setting
I/O Mode
Switch
0x02
I/O control switch
0
:
OFF
,
1
:
ON
Current setting
I/O Parameter
Configuration
0x05-
0x10
Four groups of I/O
parameters
position 1
,
force 1
,
speed
1 to position 4
,
force 4
,
speed 4
Current setting
































































