




















Tel/Fax: 0755-82734836
www.dh-robotics.com
5
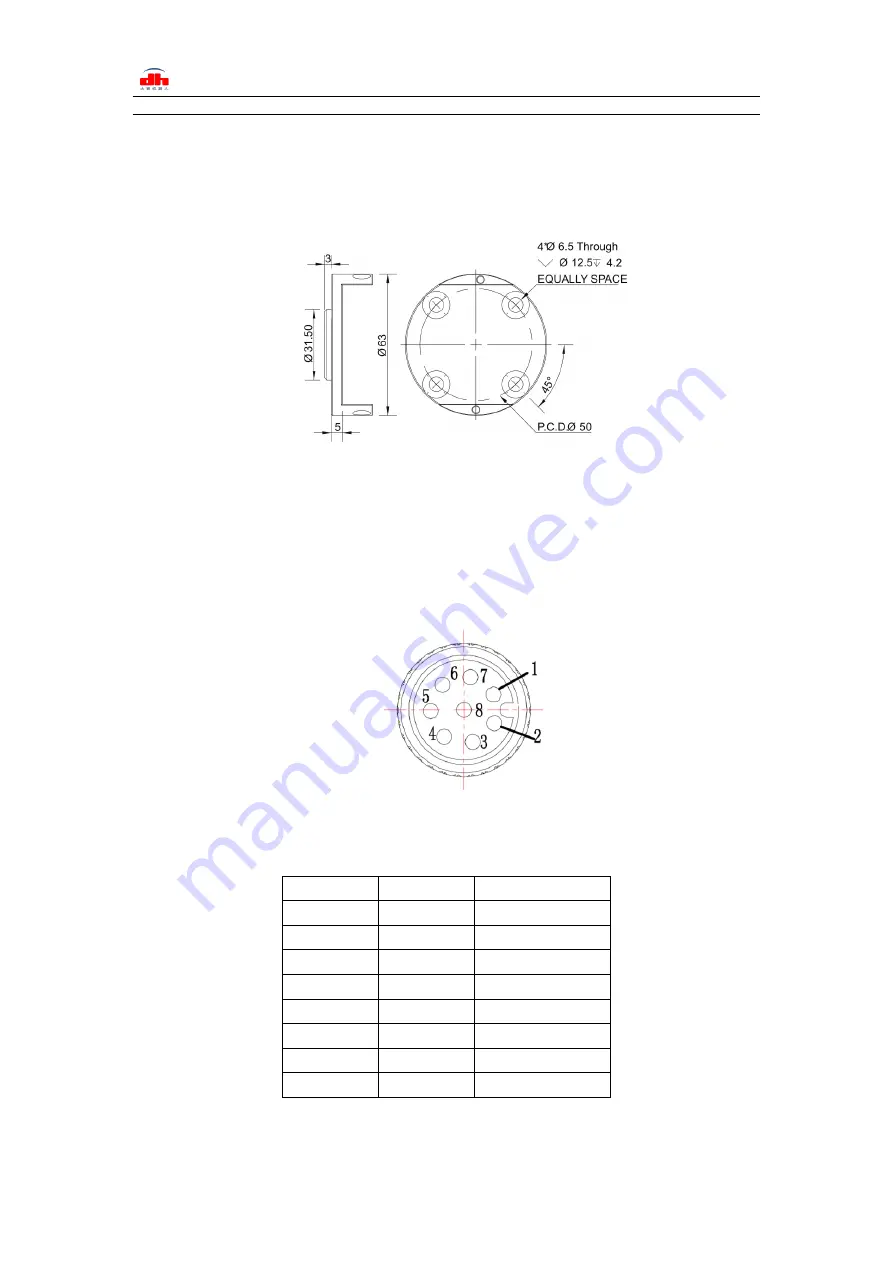
1.4 Standard flange
The flange is used for the connection between PGC-140 electric gripper and robot. The
company provides standard flange, as shown in Figure 1.4. The gripper also supports custom flanges.
0.
Figure 1.4 Standard flange according to ISO 9409-1-50-4-M6
1.5 Pinout Description
The pinout of the gripper is shown in Figure
1.5,
and the pin description is shown in
Table
1.3.
Figure1.5 Pinout assignment
Table 1.3 Pinout assignment
Wire number
Wire color
Description
1
White
485_A
2
Brown
485_B
3
Green
OUTPUT 1
4
Yellow
OUTPUT 2
5
Grey
24 V
6
Pink
INPUT 2
7
Blue
INPUT 1
8
Red
GND
































































