




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Byte3: Reserved. The default value is 0
Parameter description:
Set the running modes of servo drives. The host controller can read the current
running mode of the servo drive through PDO object 0x6061.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Basic Running Function Setting
7.7
Servo ON/OFF
7.7.1
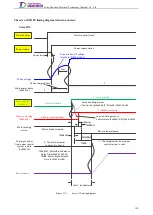
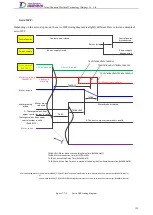
The servo can be enabled through DriveStarter simply by clicking servo ON or OFF button on the DriveStarter
interface. The EtherCAT master can enable/disable the servo through settings below: Servo ON changes the current
status of bit3, bit2, bit1 and bit0 in the control word (refer to PDO object 0x6040), and sets them to 1; servo OFF
changes the status of bit3 in 0x6040, sets it to 0, and sets bit2, bit1 and bit0 to 1.
123
Summary of Contents for EtherCAT CoolDrive RC Series
Page 1: ...Updated on Update summary Updated version Version number D3 ...
Page 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Page 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Page 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Page 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































