





























9
Chapter 2 Robot Roundup
2.1 Robot axis
2.1.1 Definition of robot axis
The robot axis can be a rotary axis or a translation axis, and the operation mode of the
axis is determined by the mechanical structure.
The robot axis is divided into the motion axis of the robot body and the external axis.
The external shaft is divided into sliding table and positioner.
Unless otherwise specified, the robot axis refers to the motion axis of the robot body.
2.1.2 Robot joint motion
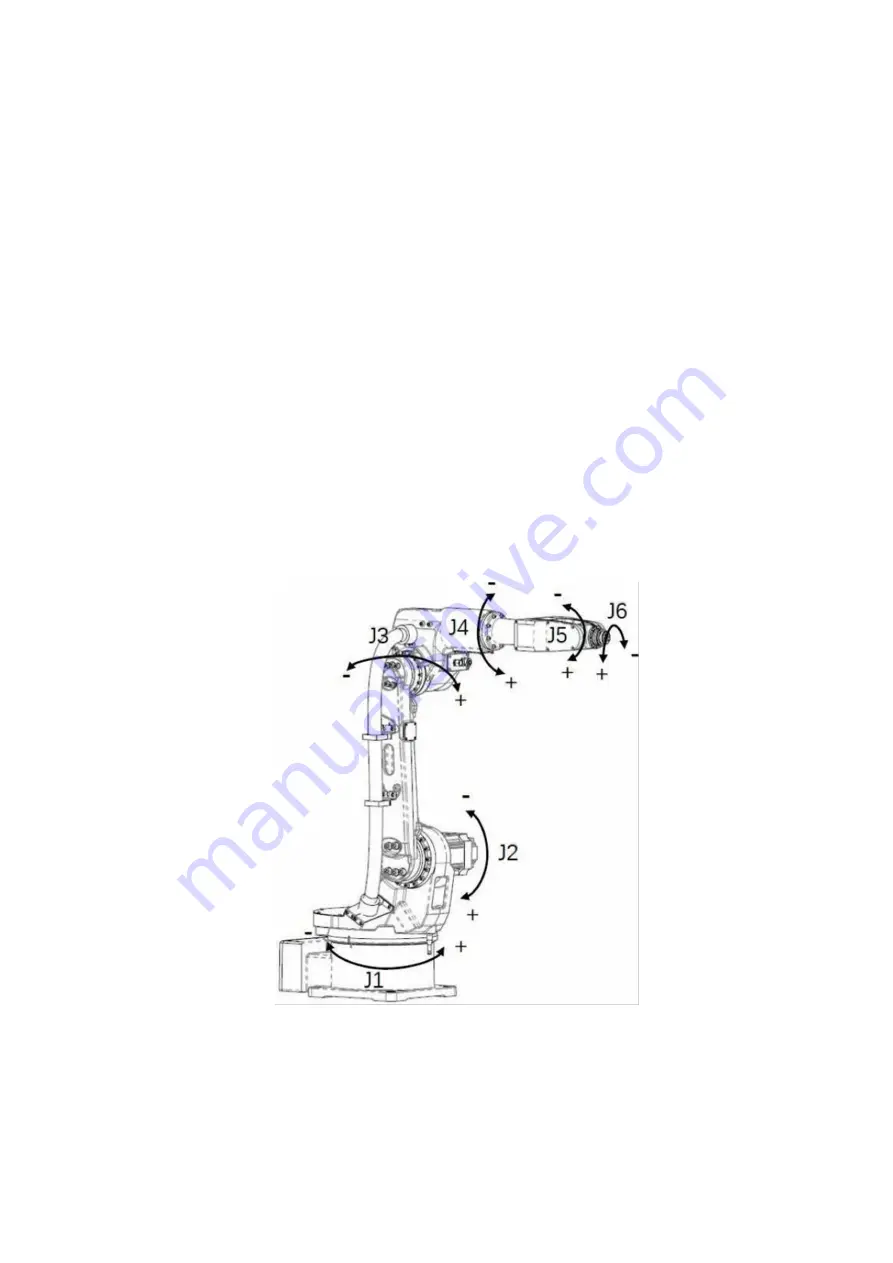
Turing robots are divided into three types of industrial robots:
◆
Industrial six-axis robot: including six rotation axes
◆
SCARA: contains three rotation axes and one translation axis
◆
Palletizing manipulator: including four rotating shafts
The joint motion of the robot is shown in the figure.
Figure 2-1 Schematic diagram of each axis of the industrial six-axis robot (TKB1400)





































































