





























13
Step 4:
Click Calculate, and then click Save.
Figure 2-6 Tool coordinate calibration
Note: Before calibrating the tool coordinates, the robot should first return to the
zero position. The zero position is very important for the accuracy of the tool
coordinates. After returning to the zero position, please confirm whether the zero
position is accurate. Normally, the robot will perform zero calibration at the factory.
If there is a collision during use, the battery is dead, and the mechanical transmission
parts have been replaced, the robot needs to be re-calibrated.
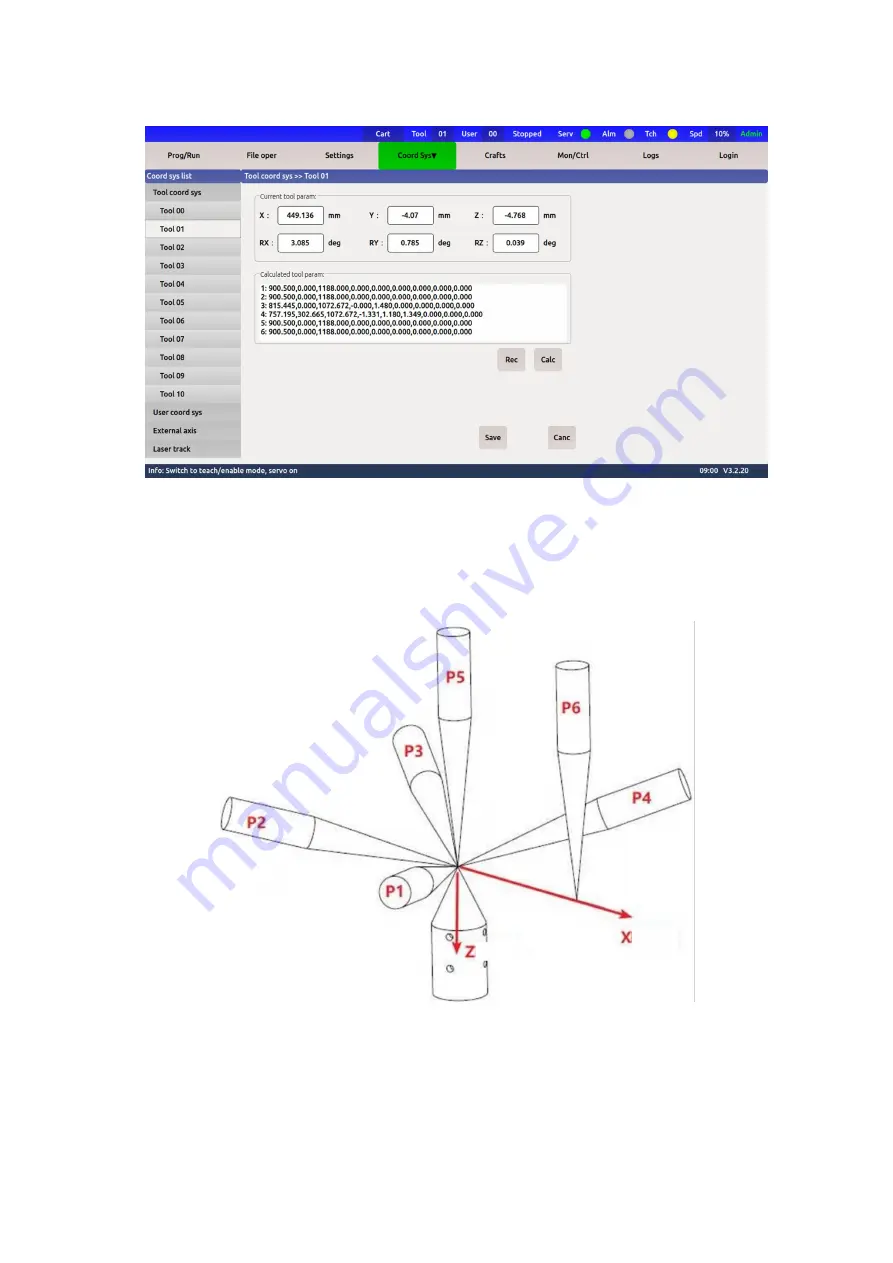
Figure 2-7 Six-point calibration of robot pose
Note: As shown in the figure above, P1-P4 and the tip calibration rod are scattered at
a certain angle, and the posture change of the point should be as large as possible; the
effective direction of the P5 point tool should be in line with the tip calibration rod to
determine the Z axis direction, Point P6 is used to determine the X direction of the tool
coordinates, that is, the connection between P5 and P6 is the X direction of the tool
coordinates (generally, when P5 is completed, move the X axis directly under the





































































