





























24
3.1.3 Teach pendant operation specification
For safety reasons, perform the following operations before teaching.
The key switch selects manual mode to prevent misoperation.
Confirm whether the emergency stop button can work normally, when the enable
switch is pressed, the servo motor is under strong power.
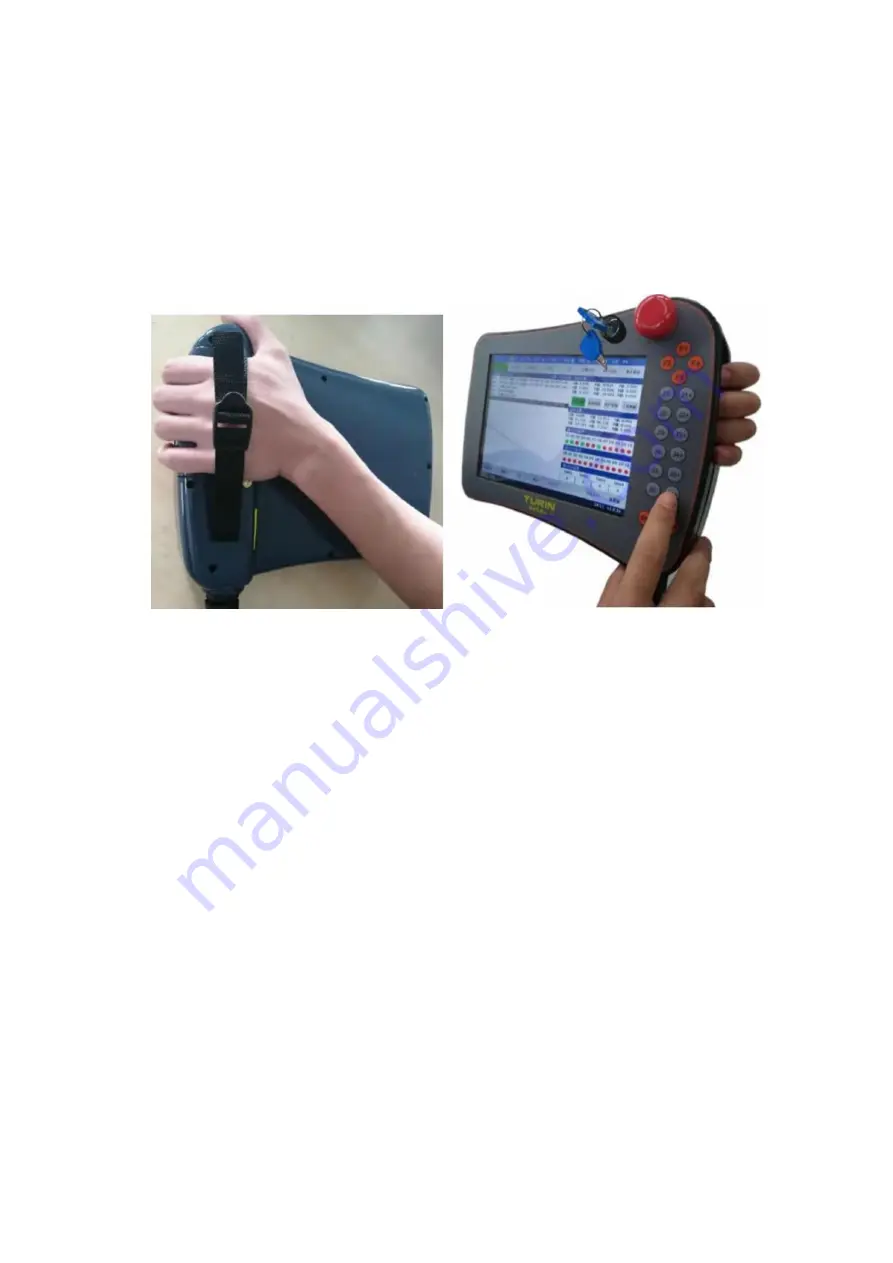
The correct operation of the Teach Pendant should be: hold the Teach Pendant at the
bottom with your left hand, pass the fastening belt on the back of your hand, and press the
enable switch with four fingers, as shown in the figure.
Figure 3-3 Teach pendant holding posture
3.2 Manual motion robot
3.2.1 system login
Before operating the robot, you need to log in to the system. System login is divided
into three levels: no login, operator login and system login.
1) No login:
only manual/automatic mode switching, program running and program
stop operation can be performed. When the equipment is debugged, only need to start and
stop production every day, no need to log in.
2) Operator login: The
operator has the authority to modify programming and point
teaching. During commissioning, or when replacing the product and re-teaching the point,
operator login is required.
Operator login settings include operator login, operator logout, and password
modification. The default password for operator login is "
33333333
".
3) Administrator login:
The operator has the authority to set the mechanical
parameters and modify the limit of the body. The system login should only be aimed at
engineering personnel or advanced users, and should not be developed for ordinary
operators. Inaccurate parameter setting will directly affect the operation of the robot.
System login settings include system login, system exit, and password modification.
The default password for system login is "
12345678
".



































































