





























25
Figure 3-4 System login
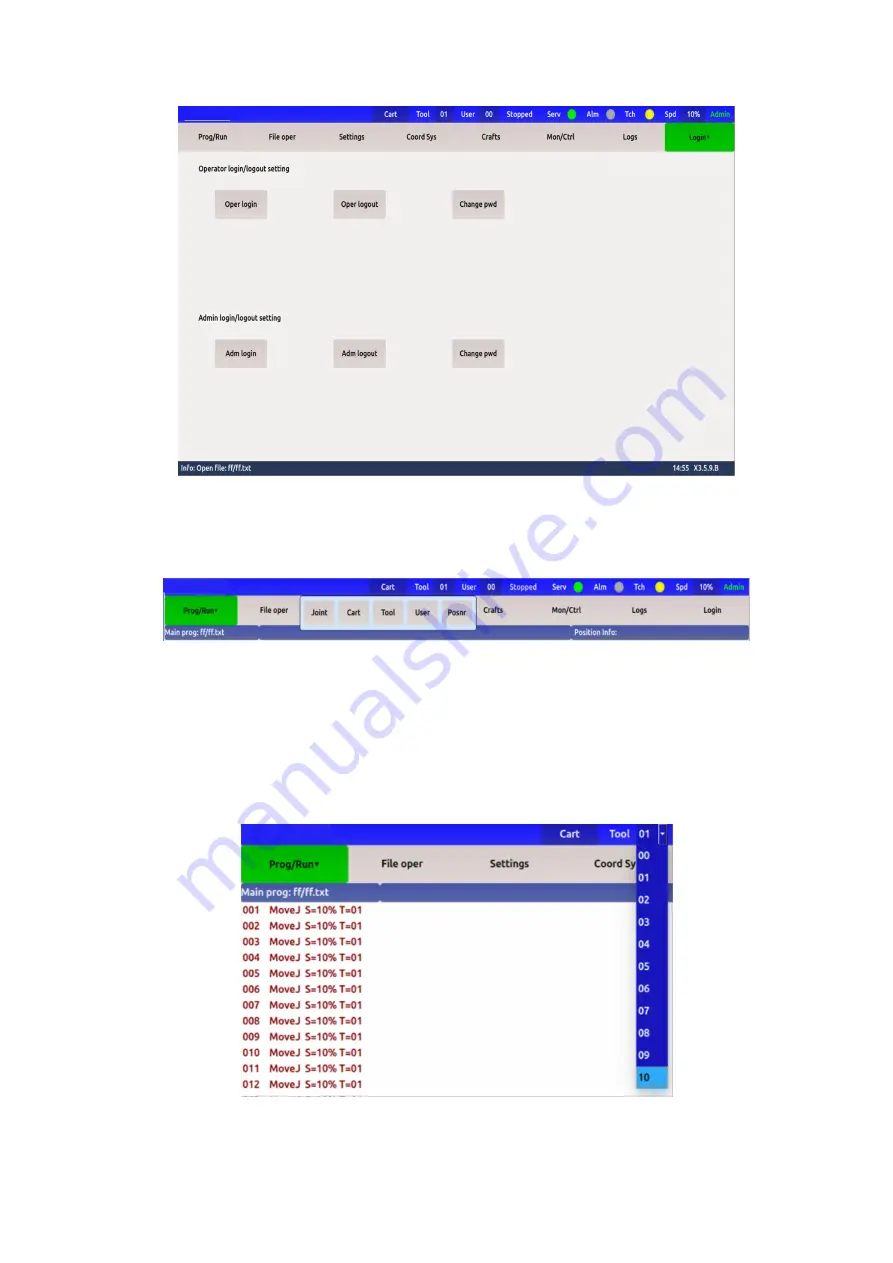
3.2.2 Coordinate system selection
The default motion coordinates of the robot are joint coordinates.
Figure 3-5 Coordinate system selection
Select the coordinate system selection in the toolbar on the upper right corner of the
touch screen, there are "joint", "right angle", "tool", "user" and "positioner" (external axis)
coordinate system can be selected, you can switch the robot coordinate system To the
corresponding coordinate system.
3.2.3 Tool and user coordinate system number selection
In the toolbar, you can select the tool and user coordinate system number.





































































