





























33
Figure 3-19 Position information of linear motion command
3) Circular motion type
When the robot needs to move to the current teaching point through the circular path,
the circular motion type is adopted. The motion command corresponding to the circular
motion type is
【
Circular motion]
】
(English command is MOVC).
Three points determine a unique arc. Therefore, three motion points are required for
arc movement. From the current point, through the first point (auxiliary point) to the
second point (end point), the arc moves. We need to have two instructions.
The operation of adding the
【
Circular Motion]
】
instruction is as follows.
The end point of the previous motion command is the starting point of circular motion.
Manually move the robot to the auxiliary point of circular motion. Click
【
Add command
】
->
【
Motion command
】
->
【
Circular motion
】
, enter the speed, acceleration, smoothing and
After related parameters such as tools and user coordinates, click the
【
New
】
button.
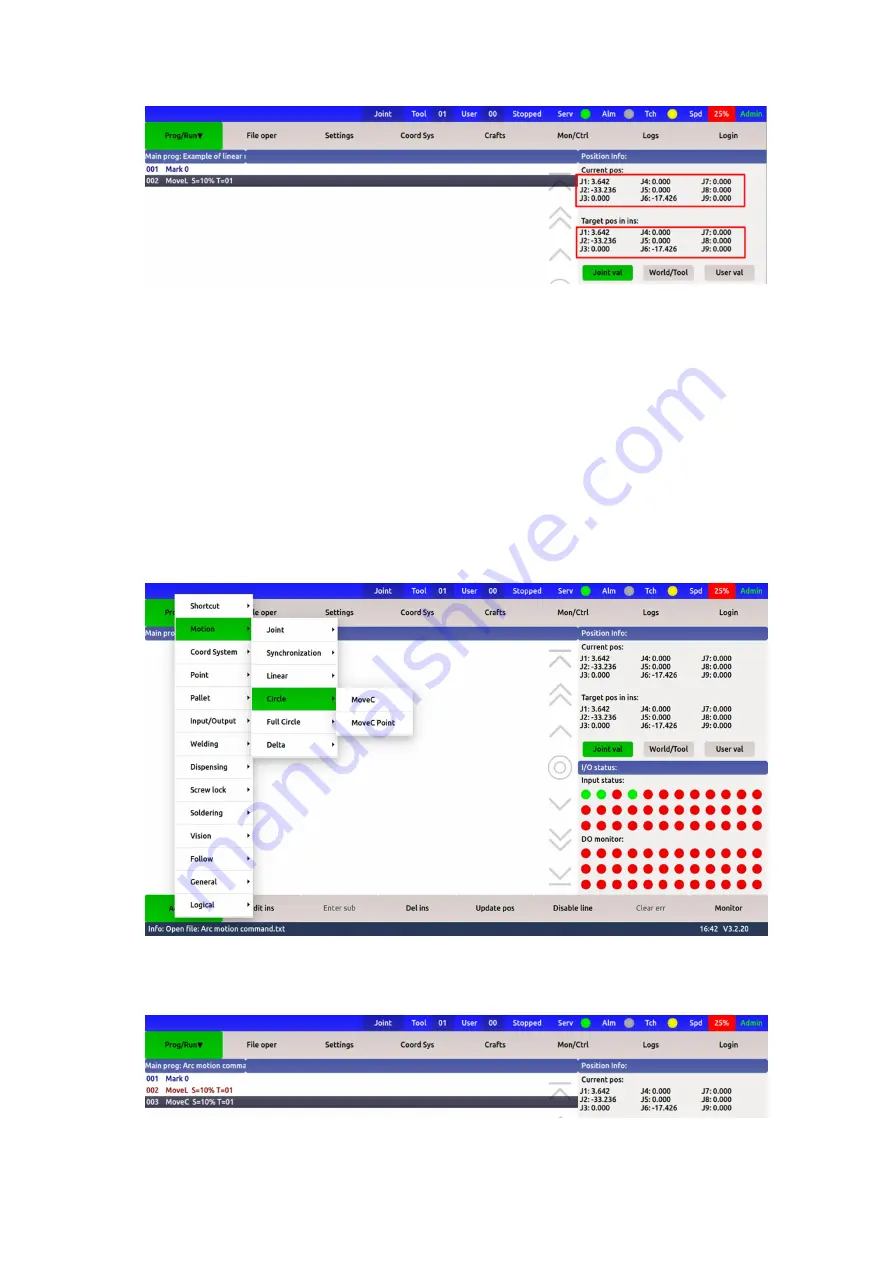
Fig. 3-20 New circular motion instruction
Set the parameters in the pop-up window and click New.
After the construction is completed, as shown below: the instruction to move to the
auxiliary point is completed. As shown below:
Figure 3-21 Add Auxiliary Point of Circular Motion Command

































































