





























69
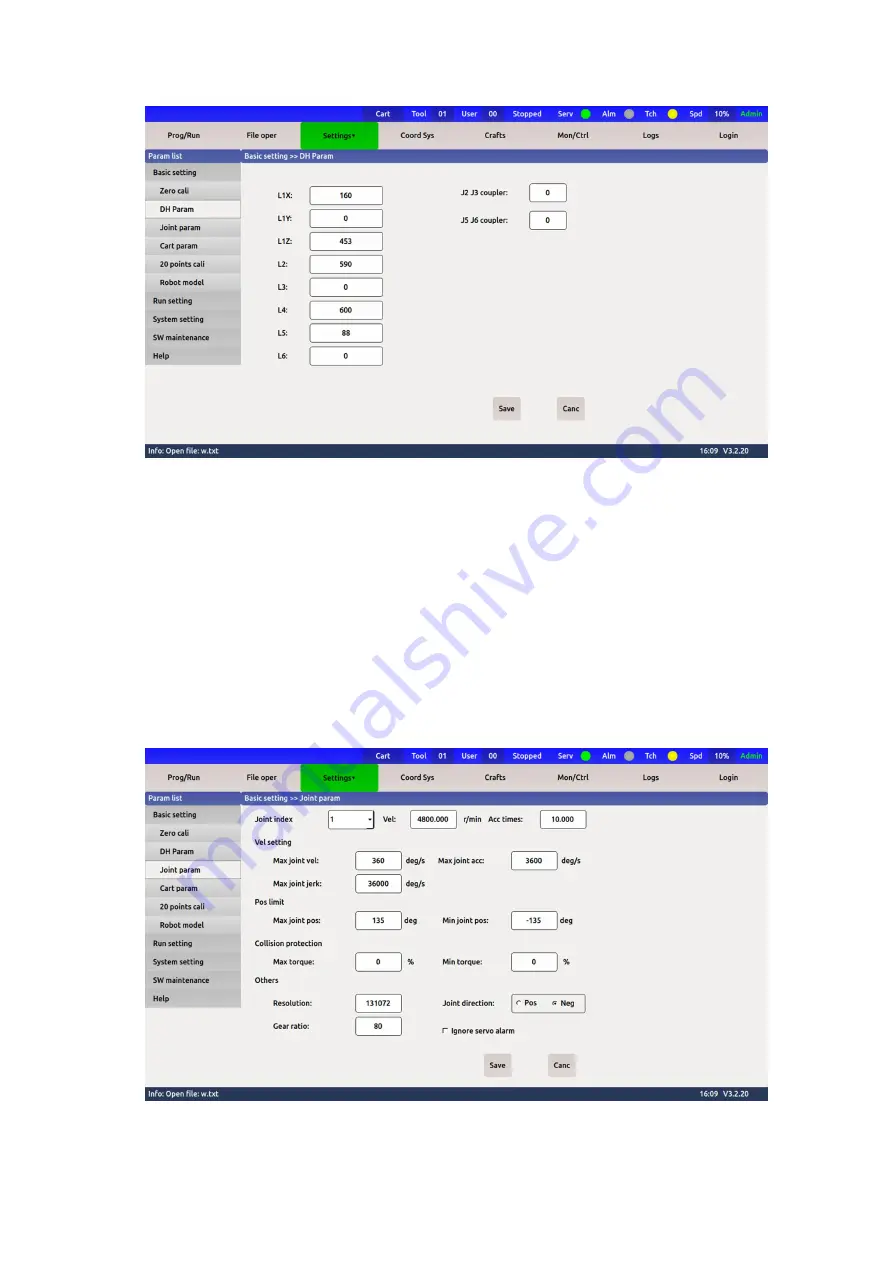
Figure 6-2 Connecting rod parameters
6.1.3 Joint parameters
We can set the joint parameters of each axis, joint parameter index 1-9, the displayed
parameters of each axis, maximum speed, maximum acceleration, maximum stop speed,
joint angle limit and so on.
This parameter affects the running speed of the robot, and the customer cannot modify
it by himself.
The system automatically calculates it, and only needs to modify the speed to
calculate the maximum speed of the shaft; if you modify the acceleration multiple, the
maximum acceleration and the maximum stop speed will be displayed in real time. Note
that this is for display only, and will not be saved in real time to save, click the
【
Save
】
button below.
Figure 6-3 Joint parameters


































































