
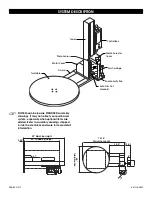















0411 IH-2957
PAGE 8 OF 17
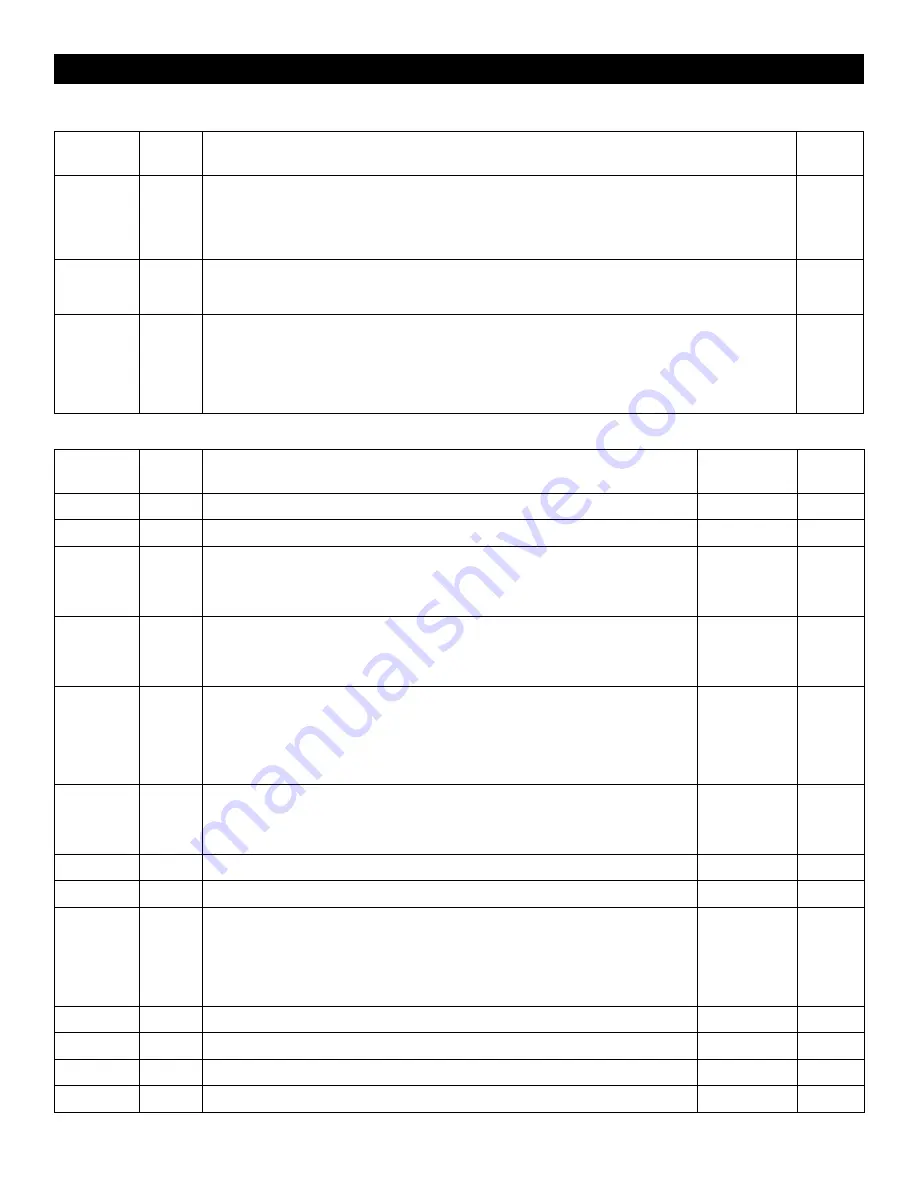
CODE
SUB-
CODE
NAME/DESCRIPTION
ADJUSTMENT
RANGE
fACTORY
SETTING
rPt-
ACC
Acceleration Time (seconds)
0.0-999.9 s
3.0 s
dEC
Deceleration Time (seconds)
0.0-999.9 s
3.0 s
brA
Decel Ramp Adaptation Assignment:
nO – Function inactive. (Used with dynamic braking)
YES – Automatically increases the deceleration time to prevent a DC bus overvoltage
dYnA – Most rapid deceleration possible without a dynamic braking resistor.
YES
Stt-
Stt
Type of Stop:
rNP – Ramp Stop
FSt – Fast Stop
nSt – Freewheel
rNP
rrS
Reverse Direction Assignment:
nO – Function inactive
L1H – Input L1 active high
L2H – Input L2 active high
L3H – Input L3 active high
L4H – Input L4 active high
nO
AdC-
AdC
Automatic DC Injection:
nO – function inactive
YES – Time limited DC injection
Ct – Continuous DC injection
YES
SdC1
Automatic DC Injection Current
0-120% if nCr
70%
tdC1
Automatic DC Injection Time (seconds)
0.1-30 s
0.5 s
PSS-
PS2
Second Preset Speed Assignment:
nO – Function inactive
L1H – Input L1 active high
L2H – Input L2 active high
L3H – Input L3 active high
L4H – Input L4 active high
nO
SP2
Second Preset Speed Reference
0-400 Hz
10 Hz
CLI-
CL1
Current Limitation
0.25-1.5 plate
varies
SPL-
LSP
Low Speed Setting (Hz)
0-HSP
0 Hz
HSP
High Speed Setting (Hz)
LSP-tFr
60 Hz
fREQUENCY DRIVE CONTINUED
CODE
SUB-
CODE
NAME/DESCRIPTION
fACTORY
SETTING
Fr1
Speed Reference Channel 1:
Al1 – Terminal analog input
LCC – Remote Display
Ndb – Modbus
AIU1 – Jog dial (wheel) on drive
Al1
CHCF
Channel Configuration:
SIN – Not separate mode. Speed and run commands from the same source.
SEP – Separate mode. Speed and run commands from different sources.
SIM
Cd1
Command Channel 1 (run fwd/rev, stop):
Only appears if CHCF is set to SEP.
tEr – terminals
LOC – Local
LCC – Remote display
Ndb – Modbut
tEr
CtL MENU
FUn MENU







































































