

















UAV-1002373-001
41
DRAFT
– TSO PENDING
Appendix C Example Installations
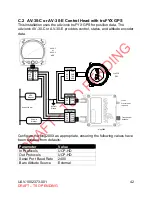
ping200X can be statically configured, or dynamically controlled by a
control head or autopilot. To meet local regulations, dynamic control may
be required (for configuration of squawk code, etc.). For complete ADS-B
messages, a position source is necessary.
The installation information below serves as a supplement to any manuals
describing controlling devices, and concern basic wiring of the transponder
control and position functionalities only. For further installation and
operating instructions, please reference the appropriate installation manual
and pilot’s guide. The installer should become fully familiar with the
installation process for the controlling device. Use of these devices may be
limited to non-certified aircraft. These descriptions are informational, and in
no way grant an installation approval.
C.1 Standalone (control optional) with truFYX GPS
for position data. An optional control
head or autopilot, configured for UCP (default) or UCP-HD protocol, may
be connected to provide other dynamic or configuration data.
Avionics
Breaker
Aircraft Power
Aircraft
Ground
BK
GY
OR
RD
TX
D
R
X
D
G
N
D
GND
TXD
RXD
PWR
WH
RD
BK
RXD
PWR
GND
Position
Control
truFYX
GPS
Transponder
Antenna
ping200X
BK
RD
GY
OR
GND
PWR
TXD
RXD
truFYX
Optional
Control Head
or
Autopilot
Static
Pressure
Configure the ping200X as appropriate.







































































