




















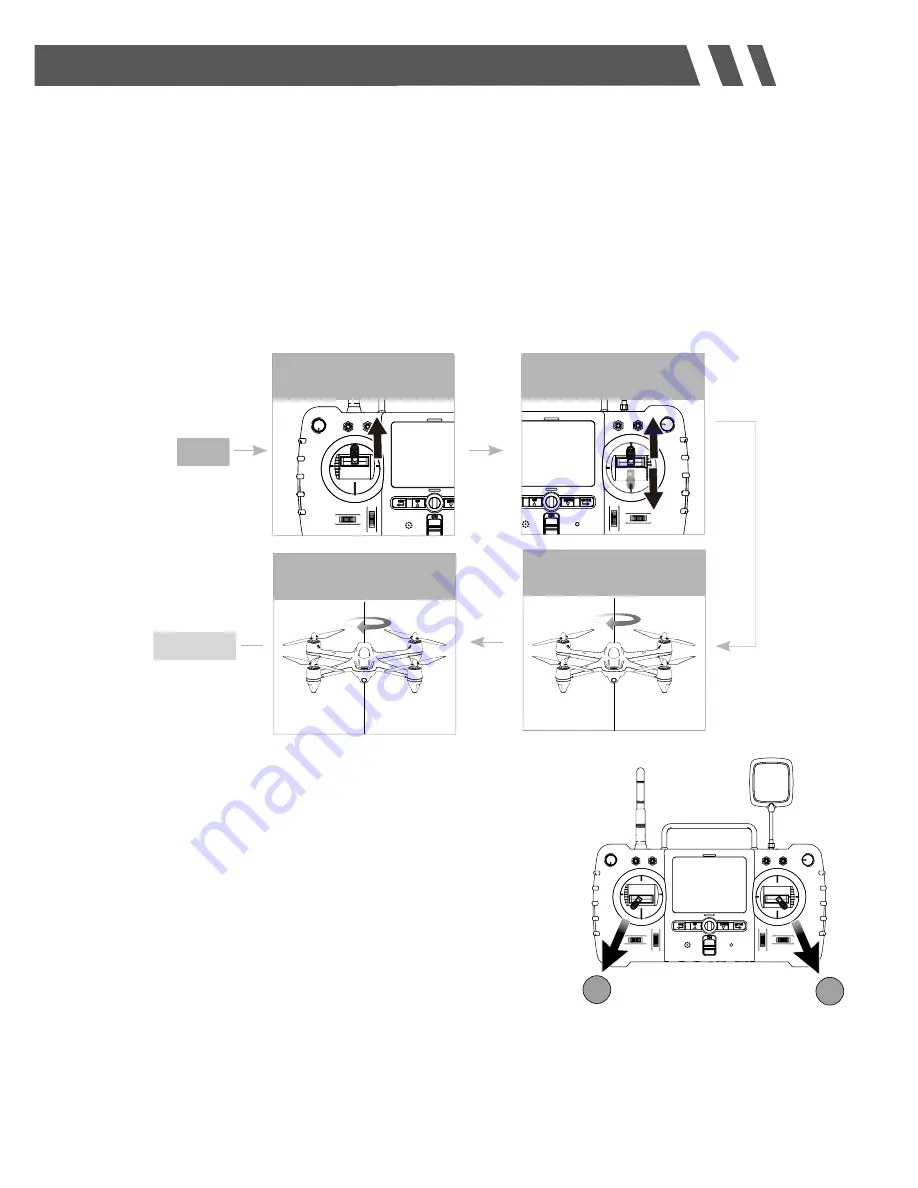
7.4.4 Rotation calibration
Rotation calibration is required when the quadcopter yaw during flight.
Please follow the calibrating procedures:
1) Push the left stick up, and move the right stick from left to right quickly until the 4 LED
indicators blink slowly ;
2) When the 4 LED indicators blink circularly, horizontally rotate the X4 in a clockwise
direction until the 4 LED indicators remain solid temporarily;
3) The 4 LED indictors will blink circularly again, repeat step 2 to rotate the X4;
4) Calibration is completed whrn the 4 LED indicators stop blinking.
15
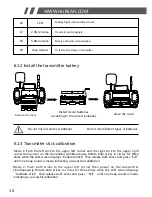
7.4.5 Start/stop the motors
Pull both sticks to the lower outer corner as shown
on the picture to start or stop the motors.
Push the throttle stick up slowly to take off;
Push the throttle stick down slowly to land.
7.4.6 Basic flight
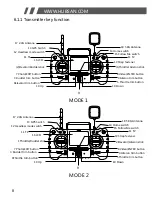
The operations of the controller are based on Mode 2.
The left stick controls the altitude and rudder of quadcopter, and the right stick controls
its forward, backward, left and right flight.
1
1
X-Hubsan H501A
开始
投准成功
左边摇杆向上打到最大量程
快速上下拨动右边摇杆直到航向灯
慢闪
当航向灯循环环形闪烁时,水平
旋转飞行器直到航向灯变为慢闪
重复上述动作直到航向灯变为
长亮
Caution:
Keep the moving propellers away from your body
as well as other people and any obstacles.
Do not let go of the controller until the motors have fully stopped.
Do not stop the motors during the flight to avoid crashing,
unless for emergency.
Complete
Start
Push the left stick up
Move the right stick from left
to right quickly until the 4
LED indicators blink slowly
Horizontally rotate the X4 in a
clockwise direction
Continue to horizontally rotate
the X4 in a clockwise direction




































































