




























209
Appendix2-Technical Specifications
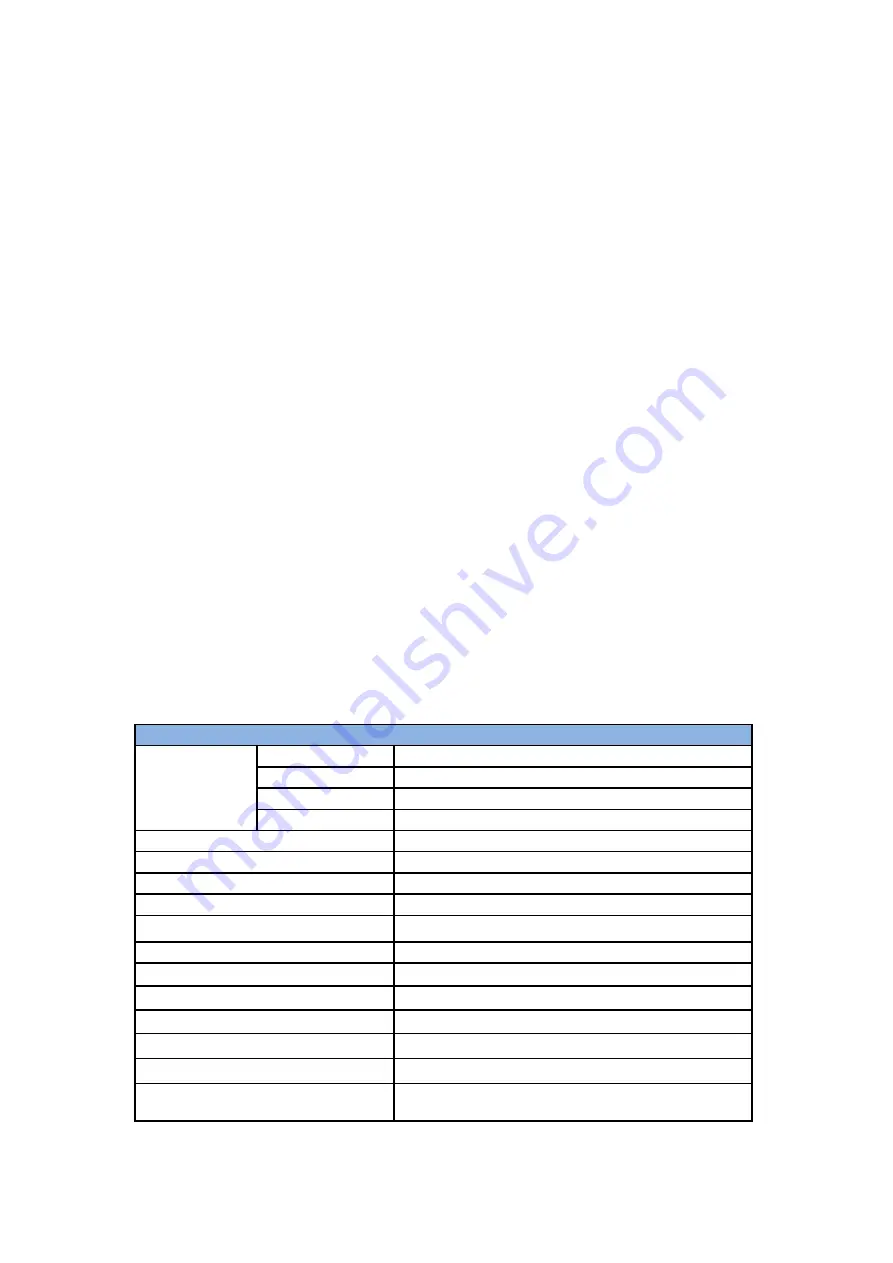
1.1 850 Common Specifications
850
Cartesian Range
X
±850 mm
Y
±850 mm
Z
-400 mm~1214 mm
Roll/Yaw/Pitch
± 180 °
Maximum Joint Speed
180 °/s
Reach
850 mm
Repeatability
±0.02 mm
Max Speed of End-effector
1 m/s
*Ambient Temperature Range
0-50 °C*
Power Consumption
Min 20 W, Typical 200 W, Max 1000 W
Input Power Supply
48V DC, 20.8A
ISO Class Cleanroom
5
Robotic Arm Mounting
Any
Programming
UFactory studio/Python/C++/ROS
Robotic Arm Communication Protocol
Private TCP
End-effector I/O Interface
2 Digital inputs, 2 Digital outputs,
Summary of Contents for 850
Page 1: ...1...
Page 72: ...72 4 The control box PC and network switch are connected by Ethernet ca ble...
Page 74: ...74 Step3 Open the Properties Step4 Open the IPV4...
Page 89: ...89 Cancel Cancel the selection Save Save the modified data Discard Discard the modified data...
Page 145: ...145 1 6 6 GPIO Control Box and End tool interface...
Page 149: ...149 1 6 7 End Effector...
Page 197: ...197 State 6 Stop Generally use studio will generate state 6 and state 6 is also a kind of stop...





































































