


















223
Speed: 100% (the general speed of the robot is set to 100% and
the movement is performed at a joint speed of 180 °/s).
Payload: maximum payload handled by the robot attached to the
TCP (5 kg).
The test on the Joint 1 was carried out by performing a horizontal
movement, the axis of rotation was perpendicular to the ground.
During the tests for Joint 2 and 3 the robot followed a vertical trajectory,
i.e. the axes of rotation were parallel to the ground, and the stop was
performed while the robot was moving downwards.
Stopping Distance (rad)
Stopping time (ms)
Joint 1
0.62
521
Joint 2
1.12
885
Joint 3
0.67
577
1.10 Maximum Speed
Mode
Typical Scenarios
Maximum Speed
Teaching mode
Live Control Page of UFactory studio
250 mm/s
Automatic mode
Blockly/ IDE of UFactory studio
1000 mm/s
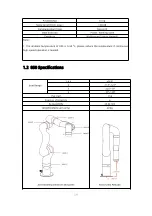
1.11 Specifications
Robotic Arm Model
XF8500
Joint Range
1,4,6
±360°
2
-118°~120°
Summary of Contents for 850
Page 1: ...1...
Page 72: ...72 4 The control box PC and network switch are connected by Ethernet ca ble...
Page 74: ...74 Step3 Open the Properties Step4 Open the IPV4...
Page 89: ...89 Cancel Cancel the selection Save Save the modified data Discard Discard the modified data...
Page 145: ...145 1 6 6 GPIO Control Box and End tool interface...
Page 149: ...149 1 6 7 End Effector...
Page 197: ...197 State 6 Stop Generally use studio will generate state 6 and state 6 is also a kind of stop...





























































